Сервоконтроллер на Ардуино Нано
- Войдите на сайт для отправки комментариев
Вс, 01/02/2015 - 10:51
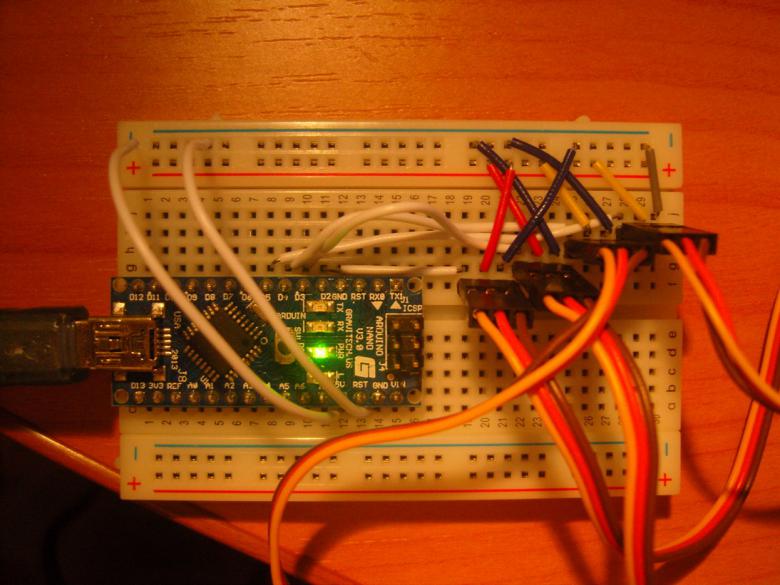
Решил сделать сервоконтроллер на Ардуино.
Имеем:
1. Ардуино Нано.
2. Четыре серводвигателя SG90.
3. Две лапки из поликапролактона.
Отработаны два типа движения: лапки гребут одновременно и шагают попеременно.
Фото:

Скетч:
int servo_1 = 2;
int servo_2 = 3;
int servo_3 = 4;
int servo_4 = 5;
long pastTime = 0;
int point_1 = 1550;
int point_2 = 1500;
int point_3 = 1500;
int point_4 = 1550;
int delta_1 = 200;
int delta_2 = 200;
int delta_3 = 200;
int delta_4 = 200;
void setup()
{
Serial.begin(9600);
pinMode(servo_1, OUTPUT);
pinMode(servo_2, OUTPUT);
pinMode(servo_3, OUTPUT);
pinMode(servo_4, OUTPUT);
}
void loop()
{
/*
//гребут одновременно
writeToServo(point_1 - delta_1, point_2, point_3 + delta_3, point_4);
delay(50);
writeToServo(point_1, point_2 - delta_2, point_3, point_4 + delta_4);
delay(50);
writeToServo(point_1 + delta_1, point_2, point_3 - delta_3, point_4);
delay(50);
*/
//шагают попеременно
writeToServo(point_1 - delta_1, point_2, point_3 - delta_3, point_4);
delay(50);
writeToServo(point_1, point_2 - delta_2, point_3, point_4);
delay(50);
writeToServo(point_1 + delta_1, point_2, point_3 + delta_3, point_4);
delay(50);
writeToServo(point_1, point_2, point_3, point_4 + delta_4);
delay(50);
}
void writeToServo(int pos1, int pos2, int pos3, int pos4)
{
for(int i=0; i<10; i++)
{
pastTime = micros();
digitalWrite(servo_1, HIGH);
delayMicroseconds(pos1);
digitalWrite(servo_1, LOW);
digitalWrite(servo_2, HIGH);
delayMicroseconds(pos2);
digitalWrite(servo_2, LOW);
digitalWrite(servo_3, HIGH);
delayMicroseconds(pos3);
digitalWrite(servo_3, LOW);
digitalWrite(servo_4, HIGH);
delayMicroseconds(pos4);
digitalWrite(servo_4, LOW);
delayMicroseconds(10000);
delayMicroseconds(3600 - (micros() - pastTime));
}
}
Видео: