Гироскоп и Аксель
- Войдите на сайт для отправки комментариев
Ср, 17/02/2016 - 00:58
Здравствуйте!
Я собираюсь замерять угол подъема горизонтально плиты, которая шарнирно закреплена одной стороной. Поднимается она гидроцилиндрами.
Я науился снимать показания с гиро и акселя, и переводить их в градусы. Но возникла одна проблема
#include <l3g4200d.h>
#include <lis331dlh.h>
#include <lis3mdl.h>
#include <LPS331.h>
#include <troyka-imu.h>
#include <Wire.h>
Gyroscope gyro;
Accelerometer accel;
float rotationThreshold = 1; //Минимальная угловая скорость, которую можно не учитывать
float pitchacc;
float currentAngle;
float pitch;
boolean DR;
float t;
float tt;
void setup() {
Serial.begin (9600);
gyro.begin();
gyro.setRange(RANGE_500);
accel.begin();
DR = true;
pitch = 0;
}
void loop() {
Serial.print ( DR); // Проверял действуюет ли первый if для задания начального угла гироскопа
Serial.print ("\t\t");
// Тут только для первого лупа задаю начальное значие угла отклонения для гироскопа, который равен показанию акселерометра
if (DR = true)
{
currentAngle = atan2(accel.readY_G(),accel.readZ_G())*180/3.14;
t = micros();
DR = false;
}
float gyroRate = gyro.readX_DegPerSec();
tt = micros();
Serial.print (tt-t);
Serial.print ("\t\t");
//Игнорировать показания гироскопа, если они меньше заданного лимита
if (gyroRate >= rotationThreshold || gyroRate <= -rotationThreshold) {
currentAngle += gyroRate*(tt-t)/1000;
Serial.print ( currentAngle);
Serial.print ("\t\t");
}
pitchacc = atan2(accel.readY_G(),accel.readZ_G())*180/3.14;
Serial.print (pitchacc);
Serial.print ("\t\t");
pitch = (pitchacc*0.05 + 0.95* currentAngle);
Serial.println(pitch);
t = tt;
}
Вопрос в другом:
1)
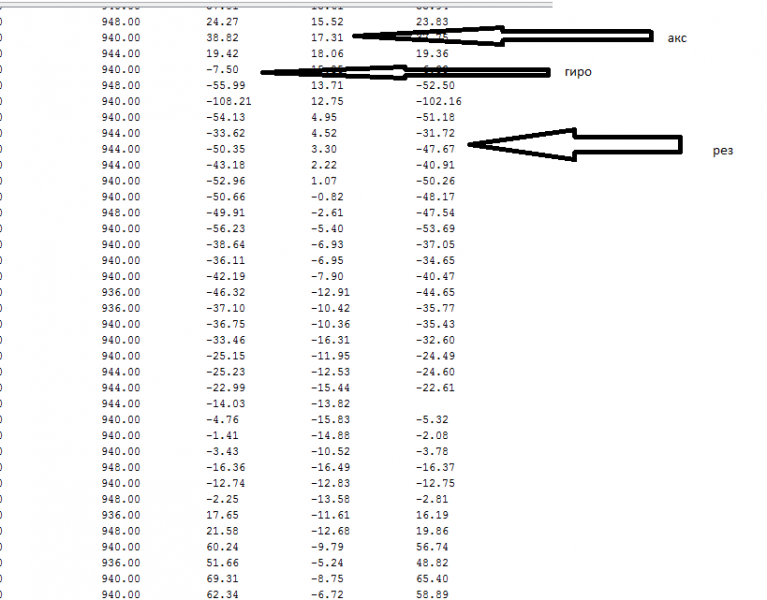
Когда я беру модуль в руки и начинаю двигать, скачут не только показания акселя, но и силно разнятся показания гироскопа(см. первую картинку). Я бы даже скзал, акселемрометр работает стабильней... При применении в практике это сильно будет влиять на результат.
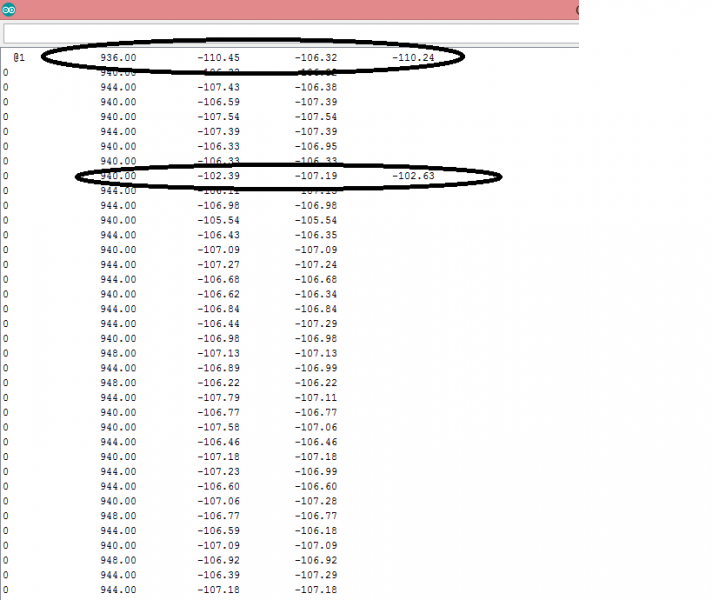
2) (см. картинку вторую) Почену Serial.print выдает третий столбик, а именно угла с комплементарным фильтром, не всегда, а только тогда, когда показания гиро и акселе разняться (начиная от разницы в 5 градусов)
Буду очень признателен