Чтобы гонять по линии.
- Войдите на сайт для отправки комментариев
Ср, 16/09/2015 - 14:58
Всем привет. Собираю робота что бы гонял по линии и поучаствовать в номинации траектория – пазл. Возник вопрос как лучше и сколько датчиков линии установить. В интернете все датчики стоят в один ряд , я хочу расположить квадратом чтобы перекрестки определял. Есть в этом смысл или не стоит?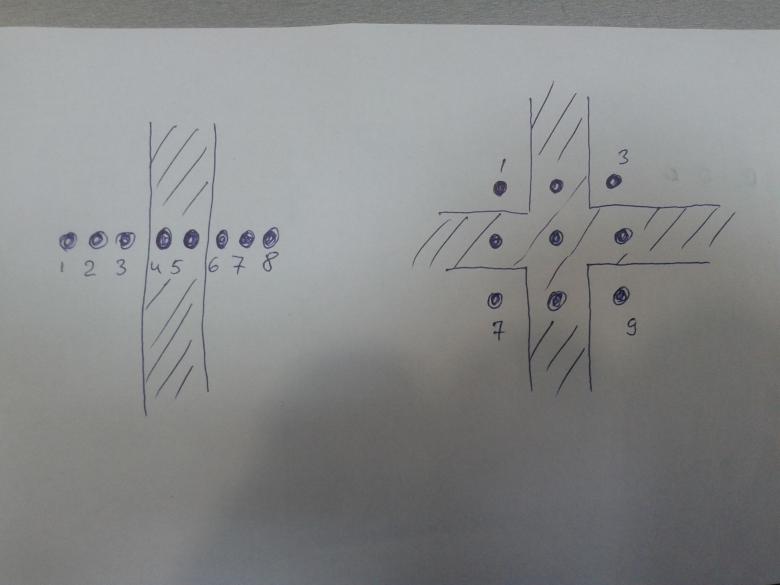
В интернете все датчики стоят в один ряд , я хочу расположить квадратом чтобы перекрестки определял.
нужно думать над алгоритмом распознавания в процессе обнаружения одним датчиком чёрного - есть варианты, когда датчики имеет смысл располагать в один ряд.
в твоём варианте - подумай, какая вероятность, что телега окажется на перекрёстке ровно так, как ты нарисовал.
> что телега окажется на перекрёстке ровно так, как ты нарисовал.
Если при этом 7-9 удерживают робота на линии, то 1-3 гарантированно словят перекресток в идеальных условиях. ПО идее должно хватит и 6 датчков
1 2 3
4 5 6
4-6 держат на прямой, 1-3 детектируют линию. Хотя тут тоже варианты есть.
Всем спасибо. Пока жду датчики. Будем пробывать.
если сделать матрицу датчиков в виде пары концентрических окружностей и один по центру, то можно анализировать перекрёстки-повороты с очень большой вероятностью правильности дальнейших поползновений.
т.е. по центру есть чёрное - смотрим, что у нас вокруг и делаем выводы, что дальше делать.
если сделать матрицу датчиков в виде пары концентрических окружностей и один по центру, то можно анализировать перекрёстки-повороты с очень большой вероятностью правильности дальнейших поползновений.
т.е. по центру есть чёрное - смотрим, что у нас вокруг и делаем выводы, что дальше делать.
Спасибо за совет. Чем больше датчиков на окружности тем лучше я понимаю так. Минимальное количество должно быть такое чтобы растояние между датчиками меньше ширины линии. Не понимаю зачем вторая окружность хотя если их будет 2 или более можно точнее определять положение. как - то вот так я понял.
Спасибо за совет. Чем больше датчиков на окружности тем лучше я понимаю так. Минимальное количество должно быть такое чтобы растояние между датчиками меньше ширины линии. Не понимаю зачем вторая окружность хотя если их будет 2 или более можно точнее определять положение. как - то вот так я понял.
ну, смотри, как я подумал - что бы определить, куда нужно будет повернуть, не достаточно срабатывания одного датчика.
нужно, что бы сработал хотя бы ещё один по направлению движения, т.е. в центр внешней окружности - поэтому две концентрические окружности и центральный датчик.
при срабатывании центрального датчика нужно принимать окончательное решение, вкуда и как ехать.
Не получается подключить МОТОР ШИЛД кплате МЕГА 2560 библиотека AFМotors . Не знаю как сформулировать вопрос короче не крутится. Подскажите простой тест для двигателя.
Такого скетча достаточно чтобы первый мотор крутился вперед?
#include <AFMotor.h> AF_DCMotor motor(1); void setup() { motor.setSpeed(200); motor.run(RELEASE); } void loop() { motor.run(FORWARD); motor.setSpeed(230); delay(100); motor.setSpeed(150); }Не понятно зачем такое датчиковое поле и чем оно лучшей 3-х датчиков, харенния предыдущего состояния и данных с энкодера двигателя.
Держать линию достаточно 2-х датчиков. Распознавать перекрестки и инверсии - 3х. Нет?
Просто собираю в первый раз. По датчикам буду пробывать начиная с трех как минимум. Пока у меня проблема не могу моторы запустить. Мотор шилд похожий на такой , например для запуска 1го мотора приходят импульсы на 1ногу IC1 как надо , а на 7 и 2 ноге IC1 на одной 0 на другой 1 а у меня на обоих 1. Почему вижу три варианта 1-неправильно в программе, 2- сдохла IC3, 3- неправильно собрана схема. Пока не могу определить.
Не подскажу. Я с L293D не общался, а похоже что это он. Оно не тянет моторы с потреблением более 0.5А, это то из-за чего даже не стал покупать, а кроме этого, я не знаю можно ли к нему подключать сервы и что из этого получится.
У меня сервы управляются напрямую от Мега2560, пины 2,3,5,6,7,8,11,12 - аппаратным ШИМом от 16-и битных таймеров на 50гц, а питание на них идет с отдельного источника - батареи аккумов 6..7в.
analogWrite(angle), где angle -- угол_в_мксек [140..620] .. и никаких проблем. :)
Моторы запустил, помогла замена микросхемы сдвигового регистра в моторшилде.
Датчики линии 7шт. разместил как на фото . Может это не самое лучшее решение но переделывать не будем, уже скоро покатушки.
Буду благодарен тому кто подскажет ссылочки или информацию по алгоритму движения и как запраграммировать.
Добрый день. Покатушки по линии закончились вот что получилось. https://youtu.be/ZzR3M4U9Foo
Сечас новая задача сделать управление тачкой через WI-FI с планшета или ноутбука, для этого приобрел ESP-01 ESP8266.
Посоветуйте кто знает:
1. какой прошивкой прошить ESP-01 ESP8266 ?
2. какую библиотеку использовать для ESP-01 ESP8266 ?
3. какую программу готовую взять для планшета или ноутбука ?
на счет "гонять по линии"
совершенно другой уровень точности можно получить, если использовать CCD LINEAR IMAGE SENSOR типа такого
http://ru.aliexpress.com/item/1PCS-TCD1304AP/32552622231.html?spm=2114.1...
при общей длине фоточувствительной части около 3см, там стоит более 3 тыс. фоточувчтвительныз элементов, т.е. можно получитьь разрешение порядка 8-24 микрон. Ничего суперсложного в управлении датчиком нет, всего 3 сигнала управления и все реализуется на 3-5в уровнях.
по линии уже откатались не очень удачно. Хочу переделать платформу на упрвление по WI-FI , информации много как сделать правильно не знаю.