драйвер двигателя L9110S плюс энкодер L939 ошибки при нагрузке
- Войдите на сайт для отправки комментариев
Чт, 18/04/2019 - 11:34
Есть такая схема :
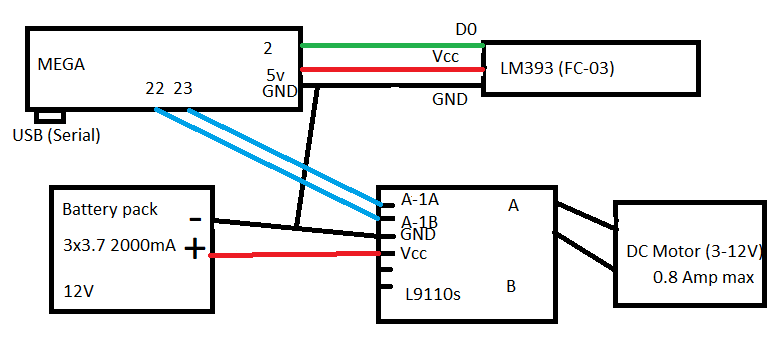
Мега, к ней на пин 2 подключен оптический энкодер, на пин 22, 23 подключен драйвер двигателя, Мега запитана оn USB.
К драйверу подключен GEAR мотор (не шаговый).
Энкодером нужно считать обороты мотора, использую колесо на валу с одной прорезью (один оборот - одно срабатывание)
Проблема : без нагрузки на мотор, показания энкодера точные. При нагрузке появляются ложные срабатывания, причем не единичные, а десятками.
Пробовал два варианта устранения ложных срабатываний предложенных тут http://androminarobot-english.blogspot.com/2017/03/encoder-and-arduinotutorial-about-ir.html
1 - конденсатор 100nF на DO и GND энкодера
2 - добавить задержку 500 микросекунд между срабатываниями
Результат практически не меняется.
У вас идут помехи от двигателя, что очевидно.
Опыта не имел, поэтому конкретного решения предложить не могу.
Однако могу дать направления для поиска: "Защита сигнала от помех"
ссылка 1 ссылка 2
Товарищ у меня на промышленном проекте использовал диффернциацию сигнала, но там помехи были от двигателй электричек. Возможно вам подойдёт что-то попроще.
UDP или можете попробовать использовать аналоговый энекодер.