easydriver_ver4_steppermotors
- Войдите на сайт для отправки комментариев
Сб, 26/04/2014 - 17:08
Кто-нибудь шаговыми моторами управлял аппаратным драйверочком easydriver ver4 ?
На странице автора что-то мутон с кодом.
Ссылка на adfuit заставляет терять время на кривой код.
Понятно, что народ свои пишет подпрограммки.

должен сразу предупредить AccelSteper.h полное ..ауно. от ADfruit https://github.com/adafruit/AccelStepper
даже с одним мотором сампроизвольно меняет направление
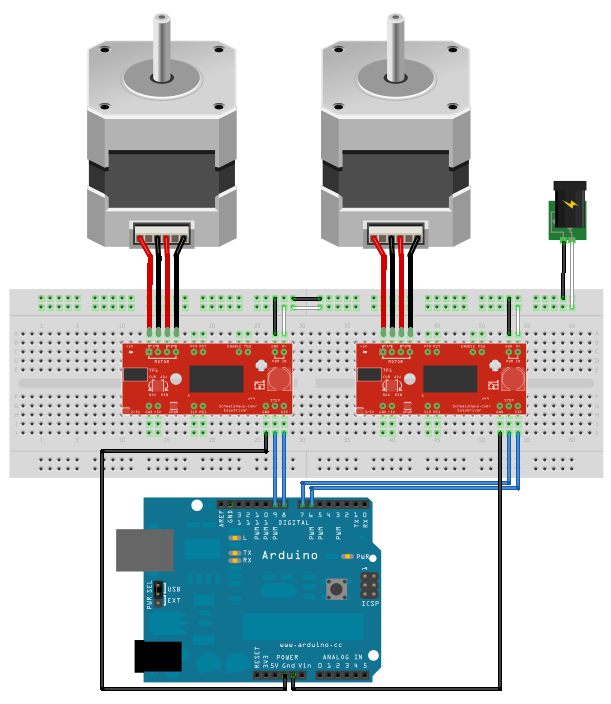
схама типовая
я для своих целей написал свои подпрограммки
//-table------------------------------------
void step1(boolean dir1,int steps1,int msec1){
digitalWrite(dir_Pin1,dir1); // direction
for(int i=0;i<steps1;i++){
digitalWrite(stepPin1,HIGH); delayMicroseconds(msec1);
digitalWrite(stepPin1, LOW); delayMicroseconds(msec1);
}
}
//-laser------------------------------------
void step2(boolean dir2,int steps2,int msec2){
digitalWrite(dir_Pin2,dir2); // direction
for(int i=0;i<steps2;i++){
digitalWrite(stepPin2,HIGH); delayMicroseconds(msec2);
digitalWrite(stepPin2, LOW); delayMicroseconds(msec2);
}
}
//-scan------------------------------------
void scan(boolean scan1){
digitalWrite(lasepin,HIGH);
step2(true, steplaser,speelaser); // scan //dir,steps,speed
digitalWrite(lasepin, LOW);
step2(false,steplaser,retulaser); // return
digitalWrite(lasepin,HIGH);
step1(true, steptable,speetable); // turn //dir,steps,speed
}
//-------------------------------------
void loop(){
...
scan(1);
...
}
но это чисто одно локальное решение
Я например 2 дня убил на кривые https://github.com/adafruit/AccelStepper
Вопрос:
подпрограмками никто не поделиться на
одна нога направление
вторая нога шаги
для шаговых двигателей
по типовой схеме вы получаете 1/8 микрошага по умолчанию сразу без заморочек
чипы греются конечно но не больше 50 градусов крутя моторы типоразмера NEMA17
на странице автора код попроще на ура
но вот его производные это что-то зя дрянь написана.
ХМ. тема скорей ближе к программированию
xm от spurkfun что-то универсальное нашел
////////////////////////////////////////////////////////////////// //©2011 bildr //Released under the MIT License - Please reuse change and share //Using the easy stepper with your arduino //use rotate and/or rotateDeg to controll stepper motor //speed is any number from .01 -> 1 with 1 being fastest - //Slower Speed == Stronger movement ///////////////////////////////////////////////////////////////// //#define DIR_PIN 2 //#define STEP_PIN 3 //#define DIR_PIN 4 //#define STEP_PIN 5 #define DIR_PIN 6 #define STEP_PIN 7 void setup() { pinMode(DIR_PIN, OUTPUT); pinMode(STEP_PIN, OUTPUT); } //------------------------------------ void rotate(int steps, float speed){ //rotate a specific number of microsteps (8 microsteps per step) - (negitive for reverse movement) //speed is any number from .01 -> 1 with 1 being fastest - Slower is stronger int dir = (steps > 0)? HIGH:LOW; steps = abs(steps); digitalWrite(DIR_PIN,dir); float usDelay = (1/speed) * 70; for(int i=0; i < steps; i++){ digitalWrite(STEP_PIN, HIGH); delayMicroseconds(usDelay); digitalWrite(STEP_PIN, LOW); delayMicroseconds(usDelay); } } //------------------------------------ void rotateDeg(float deg, float speed){ //rotate a specific number of degrees (negitive for reverse movement) //speed is any number from .01 -> 1 with 1 being fastest - Slower is stronger int dir = (deg > 0)? HIGH:LOW; digitalWrite(DIR_PIN,dir); int steps = abs(deg)*(1/0.225); float usDelay = (1/speed) * 70; for(int i=0; i < steps; i++){ digitalWrite(STEP_PIN, HIGH); delayMicroseconds(usDelay); digitalWrite(STEP_PIN, LOW); delayMicroseconds(usDelay); } } //------------------------------------ void loop(){ //rotate a specific number of degrees rotateDeg(360, 1); delay(1000); rotateDeg(-360, .1); //reverse delay(1000); //rotate a specific number of microsteps (8 microsteps per step) //a 200 step stepper would take 1600 micro steps for one full revolution rotate(1600, .5); delay(1000); rotate(-1600, .25); //reverse delay(1000); } //====================================такой код поуниверсалней будет
пары обьявлений смотрю поудобнее через пару подпрограммок проскальзывают
и в логике код покороче получается
надо будет на нескольких моторах поднапряч шаговыми импульсами ардуинку
Еще кто что видел поподпрограмместее? :)
должен сразу предупредить AccelSteper.h полное ..ауно.
А меня очень даже устраивает
я рад за тебя
смотри чтоб не два мотора и не пришлось менять направления регулярно
а какой исходник?
http://www.airspayce.com/mikem/arduino/AccelStepper/
что вы хотите сказать?
обратитесь и выскажите автору правду матку в лицо по поводу оставшегося косяка который якобы устранен
1.24 Fixed a problem introduced in 1.23: with runToPosition, which did never returned
именно в его терминологии toPosition от бапды выбирает направление до сих пор
короче
рабочий код управления моторами сколько угодно пока ноги свободные по 2 штуки есть
ПодПрограмма 8 строчек с комментариями
"просто жутко большой и не читаемый и спрятанный от анализа код"
Особенность НЕ снимает ток в состоянии покоя то есть Удерживает руку в позиции
1 нога направление
1 нога шаг
для того чтобы расслаблять 3-ую ногу SLEEP надо опускать в LOW
мне лень две строчки дописывать и потом комментировать
// art100 20140426 write stepper motor 1 table for A3987 easydriver 2 pins----------------- void step1(boolean dir1,int steps1,int msec1){ digitalWrite(dir_Pin1,dir1); // direction for(int i=0;i<steps1;i++){ digitalWrite(stepPin1,HIGH); delayMicroseconds(msec1); digitalWrite(stepPin1, LOW); delayMicroseconds(msec1); } }//--------------------------------------------------------------
применяется в составе
пара моторов
пара лазерков
джойстик аналоговый загрублен до крайних положений 0 7 (спасибо за быстрый регистровый сдвиг >> от медленная Dimax функция map(,,,,) не нужна в данном случае)
от некой ADFruit AccelStepper .ауно оно и в африке .ауно
автор самой платки вменяемее код показывает