Фильтр дребезга механического энкодера
- Войдите на сайт для отправки комментариев
Ср, 06/12/2017 - 17:08
Помогите количественно определить правильные номиналы R и С для цепочки гашения дребезга квадратурного механического энкодера.
Каналы энкодера - А, Б + кнопка . RC цепь нужна для частот замыкания (количество передних + задних фронтов) от 1 до 200 Гц (с запасом).
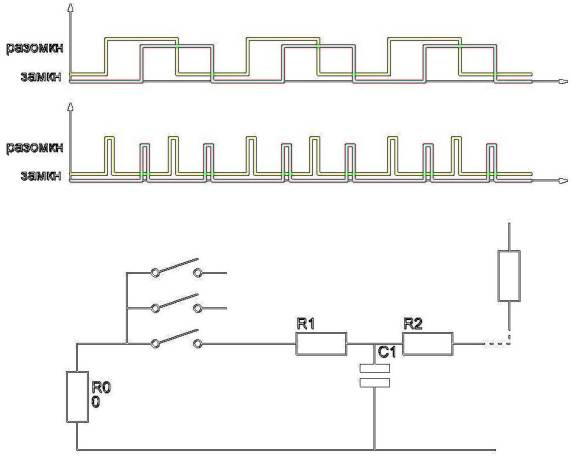
Использую два типа механических энкодеров (у второго частота ровно в 2 раза больше):
- первый тип (рис. 1) формирует импульсы по каналам А и Б, которые пересекаются во времени и смещены на полпериода
- второй тип (рис. 2) формирует короткий одиночный импульс вместо переднего фронта А и в такой же по бывшему заднему фронту. Для канала Б аналогично .
Энкодер замыкает цепь непосредственно на землю . Вход МК Atmel 2560 программно подтянут к плюсу питания внутренним PULLUP-резистором приблизительно 5-20к.
Вот здесь очень подробно расписано как что считается и схемы приведены. Также там приведены коды для программного или программно-аппаратного подавления дребезга. Вам, кстати, кроме RC цепочки, ещё бы и триггер не помешал, см. схемы в статье.
А вообще, оптимально Вам взять вот такую микросхему, конденсаторы для неё посчитать по метоике из статьи, а всё остальное (триггеры) уже есть в микросхеме на 6 контактов.
Спасибо ЕвгенийП , и еще спрошу- ошибочно написал, что второй тип энкодера (импульсы на рис 2) уже использую, но реально только что обнаружил у себя в закромах такие. Он имеет право на существование и можно ли с ним определить направление вращения, если импульсы А и Б не пересекаются во времени?
Если импульсы А и Б не пересекаются во времени то по ним нельзя определить направления вращения => права на существование не имеет.