Nano V3 CH340 непонятки со скоростями COM порта
- Войдите на сайт для отправки комментариев
Втр, 15/08/2017 - 14:35

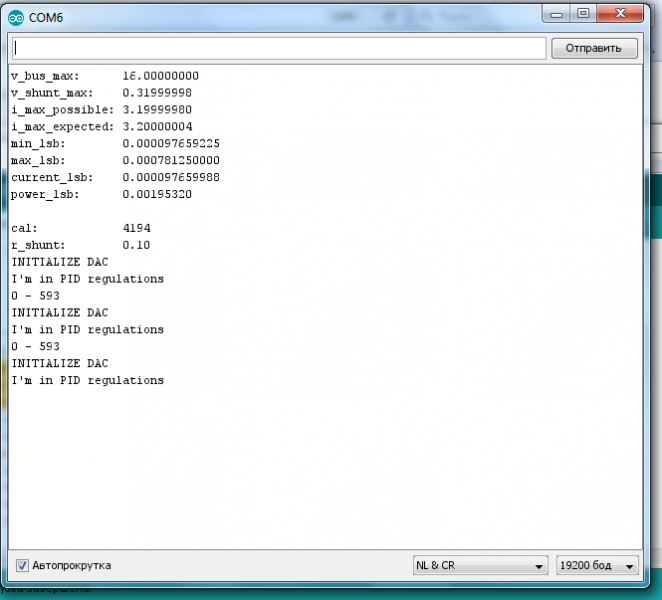
После заливки скетча скорость порта указанная в скетче не соответствует скорости порта в мониторе порта:
До заливки скетча всё было правильно.
Куда оно залезло и что сломало?
Перезаливкой любого друго скетча, где было ранее был всё нормально проблемы не решает.
Код инициализации порта типовой
Serial.begin(9600); digitalWrite(8, LOW); monitor.begin(68); // i2c address 64=0x40 68=0х44 исправлять и в ina219.h одновременно
Произошло после исправления значения с 3-й строке )))
Есть какие мысли???
#include "INA219.h" #include <util/delay.h> INA219::INA219() { } void INA219::begin(uint8_t addr) { Wire.begin(); i2c_address = addr; gain = D_GAIN; } // calibration of equations and device // shunt_val = value of shunt in Ohms // v_shunt_max = maximum value of voltage across shunt // v_bus_max = maximum voltage of bus // i_max_expected = maximum current draw of bus + shunt // default values are for a 0.25 Ohm shunt on a 5V bus with max current of 1A void INA219::calibrate(float shunt_val, float v_shunt_max, float v_bus_max, float i_max_expected) { uint16_t cal; float i_max_possible, min_lsb, max_lsb, swap; r_shunt = shunt_val; i_max_possible = v_shunt_max / r_shunt; min_lsb = i_max_expected / 32767; max_lsb = i_max_expected / 4096; current_lsb = (uint16_t)(min_lsb * 100000000) + 1; current_lsb /= 100000000; swap = (0.04096)/(current_lsb*r_shunt); cal = (uint16_t)swap; power_lsb = current_lsb * 20; #if (INA219_DEBUG == 1) Serial.print("v_bus_max: "); Serial.println(v_bus_max, 8); Serial.print("v_shunt_max: "); Serial.println(v_shunt_max, 8); Serial.print("i_max_possible: "); Serial.println(i_max_possible, 8); Serial.print("i_max_expected: "); Serial.println(i_max_expected, 8); Serial.print("min_lsb: "); Serial.println(min_lsb, 12); Serial.print("max_lsb: "); Serial.println(max_lsb, 12); Serial.print("current_lsb: "); Serial.println(current_lsb, 12); Serial.print("power_lsb: "); Serial.println(power_lsb, 8); Serial.println(" "); Serial.print("cal: "); Serial.println(cal); Serial.print("r_shunt: "); Serial.println(r_shunt); #endif write16(CAL_R, cal); } // config values (range, gain, bus adc, shunt adc, mode) can be derived from pp26-27 in the datasheet // defaults are: // range = 1 (0-32V bus voltage range) // gain = 3 (1/8 gain - 320mV range) // bus adc = 3 (12-bit, single sample, 532uS conversion time) // shunt adc = 3 (12-bit, single sample, 532uS conversion time) // mode = 7 (continuous conversion) void INA219::configure(uint8_t range, uint8_t gain, uint8_t bus_adc, uint8_t shunt_adc, uint8_t mode) { config = 0; config |= (range << BRNG | gain << PG0 | bus_adc << BADC1 | shunt_adc << SADC1 | mode); write16(CONFIG_R, config); } // resets the INA219 void INA219::reset() { write16(CONFIG_R, INA_RESET); _delay_ms(5); } // returns the raw binary value of the shunt voltage int16_t INA219::shuntVoltageRaw() { return read16(V_SHUNT_R); } // returns the shunt voltage in volts. float INA219::shuntVoltage() { float temp; temp = read16(V_SHUNT_R); return (temp / 100000); } // returns raw bus voltage binary value int16_t INA219::busVoltageRaw() { return read16(V_BUS_R); } // returns the bus voltage in volts float INA219::busVoltage() { int16_t temp; temp = read16(V_BUS_R); temp >>= 3; return (temp * 0.004); } // returns the shunt current in amps float INA219::shuntCurrent() { return (read16(I_SHUNT_R) * current_lsb); } // returns the bus power in watts float INA219::busPower() { return (read16(P_BUS_R) * power_lsb); } /********************************************************************** * INTERNAL I2C FUNCTIONS * **********************************************************************/ // writes a 16-bit word (d) to register pointer (a) // when selecting a register pointer to read from, (d) = 0 void INA219::write16(uint8_t a, uint16_t d) { uint8_t temp; temp = (uint8_t)d; d >>= 8; Wire.beginTransmission(i2c_address); // start transmission to device #if ARDUINO >= 100 Wire.write(a); // sends register address to read from Wire.write((uint8_t)d); // write data hibyte Wire.write(temp); // write data lobyte; #else Wire.send(a); // sends register address to read from Wire.send((uint8_t)d); // write data hibyte Wire.send(temp); // write data lobyte; #endif Wire.endTransmission(); // end transmission delay(1); } int16_t INA219::read16(uint8_t a) { uint16_t ret; // move the pointer to reg. of interest, null argument write16(a, 0); Wire.requestFrom((int)i2c_address, 2); // request 2 data bytes #if ARDUINO >= 100 ret = Wire.read(); // rx hi byte ret <<= 8; ret |= Wire.read(); // rx lo byte #else ret = Wire.receive(); // rx hi byte ret <<= 8; ret |= Wire.receive(); // rx lo byte #endif Wire.endTransmission(); // end transmission return ret; }вопрос снят, разобрался )))