Прошить PIC ардуиной
- Войдите на сайт для отправки комментариев
Пт, 26/01/2018 - 00:41
нужно прошить 8-ми лапый Dip PIC 12F675 .Нашел вот здесь инфу, что можно пик прошить ардуиной . Там автор выложил скетч для ардуино, схему подключения и программу для прошивки пика ардуиной. Далее там люди благодарят автора, что у них получилось, значит скетч должен быть рабочий, но у меня почему то не компилируется (файл скетча выложен с расширением *.pde ). Компилятор много чего ругает, мне не понятно. Может кто подскажет, если не сложно.
/* * Copyright (C) 2012 Southern Storm Software, Pty Ltd. * * This program is free software: you can redistribute it and/or modify * it under the terms of the GNU General Public License as published by * the Free Software Foundation, either version 3 of the License, or * (at your option) any later version. * * This program is distributed in the hope that it will be useful, * but WITHOUT ANY WARRANTY; without even the implied warranty of * MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the * GNU General Public License for more details. * * You should have received a copy of the GNU General Public License * along with this program. If not, see <http://www.gnu.org/licenses/>. */ #define __PROG_TYPES_COMPAT__ #include <avr/pgmspace.h> // For PROGMEM // Pin mappings for the PIC programming shield. #define PIN_MCLR A1 // 0: MCLR is VPP voltage, 1: Reset PIC #define PIN_ACTIVITY A5 // LED that indicates read/write activity #define PIN_VDD 2 // Controls the power to the PIC #define PIN_CLOCK 4 // Clock pin #define PIN_DATA 7 // Data pin #define MCLR_RESET HIGH // PIN_MCLR state to reset the PIC #define MCLR_VPP LOW // PIN_MCLR state to apply 13v to MCLR/VPP pin // All delays are in microseconds. #define DELAY_SETTLE 50 // Delay for lines to settle for reset #define DELAY_TPPDP 5 // Hold time after raising MCLR #define DELAY_THLD0 5 // Hold time after raising VDD #define DELAY_TSET1 1 // Data in setup time before lowering clock #define DELAY_THLD1 1 // Data in hold time after lowering clock #define DELAY_TDLY2 1 // Delay between commands or data #define DELAY_TDLY3 1 // Delay until data bit read will be valid #define DELAY_TPROG 4000 // Time for a program memory write to complete #define DELAY_TDPROG 6000 // Time for a data memory write to complete #define DELAY_TERA 6000 // Time for a word erase to complete #define DELAY_TPROG5 1000 // Time for program write on FLASH5 systems #define DELAY_TFULLERA 50000 // Time for a full chip erase #define DELAY_TFULL84 20000 // Intermediate wait for PIC16F84/PIC16F84A // Commands that may be sent to the device. #define CMD_LOAD_CONFIG 0x00 // Load (write) to config memory #define CMD_LOAD_PROGRAM_MEMORY 0x02 // Load to program memory #define CMD_LOAD_DATA_MEMORY 0x03 // Load to data memory #define CMD_INCREMENT_ADDRESS 0x06 // Increment the PC #define CMD_READ_PROGRAM_MEMORY 0x04 // Read from program memory #define CMD_READ_DATA_MEMORY 0x05 // Read from data memory #define CMD_BEGIN_PROGRAM 0x08 // Begin programming with erase cycle #define CMD_BEGIN_PROGRAM_ONLY 0x18 // Begin programming only cycle #define CMD_END_PROGRAM_ONLY 0x17 // End programming only cycle #define CMD_BULK_ERASE_PROGRAM 0x09 // Bulk erase program memory #define CMD_BULK_ERASE_DATA 0x0B // Bulk erase data memory #define CMD_CHIP_ERASE 0x1F // Erase the entire chip // States this application may be in. #define STATE_IDLE 0 // Idle, device is held in the reset state #define STATE_PROGRAM 1 // Active, reading and writing program memory #define STATE_CONFIG 2 // Active, reading and writing config memory int state = STATE_IDLE; // Flash types. Uses a similar naming system to picprog. #define EEPROM 0 #define FLASH 1 #define FLASH4 4 #define FLASH5 5 unsigned long pc = 0; // Current program counter. // Flat address ranges for the various memory spaces. Defaults to the values // for the PIC16F628A. "DEVICE" command updates to the correct values later. unsigned long programEnd = 0x07FF; unsigned long configStart = 0x2000; unsigned long configEnd = 0x2007; unsigned long dataStart = 0x2100; unsigned long dataEnd = 0x217F; unsigned long reservedStart = 0x0800; unsigned long reservedEnd = 0x07FF; unsigned int configSave = 0x0000; byte progFlashType = FLASH4; byte dataFlashType = EEPROM; // Device names, forced out into PROGMEM. const char s_pic12f629[] PROGMEM = "pic12f629"; const char s_pic12f675[] PROGMEM = "pic12f675"; const char s_pic16f630[] PROGMEM = "pic16f630"; const char s_pic16f676[] PROGMEM = "pic16f676"; const char s_pic16f84[] PROGMEM = "pic16f84"; const char s_pic16f84a[] PROGMEM = "pic16f84a"; const char s_pic16f87[] PROGMEM = "pic16f87"; const char s_pic16f88[] PROGMEM = "pic16f88"; const char s_pic16f627[] PROGMEM = "pic16f627"; const char s_pic16f627a[] PROGMEM = "pic16f627a"; const char s_pic16f628[] PROGMEM = "pic16f628"; const char s_pic16f628a[] PROGMEM = "pic16f628a"; const char s_pic16f648a[] PROGMEM = "pic16f648a"; const char s_pic16f882[] PROGMEM = "pic16f882"; const char s_pic16f883[] PROGMEM = "pic16f883"; const char s_pic16f884[] PROGMEM = "pic16f884"; const char s_pic16f886[] PROGMEM = "pic16f886"; const char s_pic16f887[] PROGMEM = "pic16f887"; // List of devices that are currently supported and their properties. // Note: most of these are based on published information and have not // been tested by the author. Patches welcome to improve the list. struct deviceInfo { const prog_char *name; // User-readable name of the device. prog_int16_t deviceId; // Device ID for the PIC (-1 if no id). prog_uint32_t programSize; // Size of program memory (words). prog_uint32_t configStart; // Flat address start of configuration memory. prog_uint32_t dataStart; // Flat address start of EEPROM data memory. prog_uint16_t configSize; // Number of configuration words. prog_uint16_t dataSize; // Size of EEPROM data memory (bytes). prog_uint16_t reservedWords;// Reserved program words (e.g. for OSCCAL). prog_uint16_t configSave; // Bits in config word to be saved. prog_uint8_t progFlashType; // Type of flash for program memory. prog_uint8_t dataFlashType; // Type of flash for data memory. }; struct deviceInfo const devices[] PROGMEM = { // http://ww1.microchip.com/downloads/en/DeviceDoc/41191D.pdf {s_pic12f629, 0x0F80, 1024, 0x2000, 0x2100, 8, 128, 1, 0x3000, FLASH4, EEPROM}, {s_pic12f675, 0x0FC0, 1024, 0x2000, 0x2100, 8, 128, 1, 0x3000, FLASH4, EEPROM}, {s_pic16f630, 0x10C0, 1024, 0x2000, 0x2100, 8, 128, 1, 0x3000, FLASH4, EEPROM}, {s_pic16f676, 0x10E0, 1024, 0x2000, 0x2100, 8, 128, 1, 0x3000, FLASH4, EEPROM}, // http://ww1.microchip.com/downloads/en/DeviceDoc/30262e.pdf {s_pic16f84, -1, 1024, 0x2000, 0x2100, 8, 64, 0, 0, FLASH, EEPROM}, {s_pic16f84a, 0x0560, 1024, 0x2000, 0x2100, 8, 64, 0, 0, FLASH, EEPROM}, // http://ww1.microchip.com/downloads/en/DeviceDoc/39607c.pdf {s_pic16f87, 0x0720, 4096, 0x2000, 0x2100, 9, 256, 0, 0, FLASH5, EEPROM}, {s_pic16f88, 0x0760, 4096, 0x2000, 0x2100, 9, 256, 0, 0, FLASH5, EEPROM}, // 627/628: http://ww1.microchip.com/downloads/en/DeviceDoc/30034d.pdf // A series: http://ww1.microchip.com/downloads/en/DeviceDoc/41196g.pdf {s_pic16f627, 0x07A0, 1024, 0x2000, 0x2100, 8, 128, 0, 0, FLASH, EEPROM}, {s_pic16f627a, 0x1040, 1024, 0x2000, 0x2100, 8, 128, 0, 0, FLASH4, EEPROM}, {s_pic16f628, 0x07C0, 2048, 0x2000, 0x2100, 8, 128, 0, 0, FLASH, EEPROM}, {s_pic16f628a, 0x1060, 2048, 0x2000, 0x2100, 8, 128, 0, 0, FLASH4, EEPROM}, {s_pic16f648a, 0x1100, 4096, 0x2000, 0x2100, 8, 256, 0, 0, FLASH4, EEPROM}, // http://ww1.microchip.com/downloads/en/DeviceDoc/41287D.pdf {s_pic16f882, 0x2000, 2048, 0x2000, 0x2100, 9, 128, 0, 0, FLASH4, EEPROM}, {s_pic16f883, 0x2020, 4096, 0x2000, 0x2100, 9, 256, 0, 0, FLASH4, EEPROM}, {s_pic16f884, 0x2040, 4096, 0x2000, 0x2100, 9, 256, 0, 0, FLASH4, EEPROM}, {s_pic16f886, 0x2060, 8192, 0x2000, 0x2100, 9, 256, 0, 0, FLASH4, EEPROM}, {s_pic16f887, 0x2080, 8192, 0x2000, 0x2100, 9, 256, 0, 0, FLASH4, EEPROM}, {0, 0, 0, 0, 0, 0, 0, 0, 0, 0} }; // Buffer for command-line character input and READBIN data packets. #define BINARY_TRANSFER_MAX 64 #define BUFFER_MAX (BINARY_TRANSFER_MAX + 1) char buffer[BUFFER_MAX]; int buflen = 0; unsigned long lastActive = 0; void setup() { // Need a serial link to the host. Serial.begin(9600); // Hold the PIC in the powered down/reset state until we are ready for it. pinMode(PIN_MCLR, OUTPUT); pinMode(PIN_VDD, OUTPUT); digitalWrite(PIN_MCLR, MCLR_RESET); digitalWrite(PIN_VDD, LOW); // Clock and data are floating until the first PIC command. pinMode(PIN_CLOCK, INPUT); pinMode(PIN_DATA, INPUT); // Turn off the activity LED initially. pinMode(PIN_ACTIVITY, OUTPUT); digitalWrite(PIN_ACTIVITY, LOW); } void loop() { if (Serial.available()) { // Process serial input for commands from the host. int ch = Serial.read(); if (ch == 0x0A || ch == 0x0D) { // End of the current command. Blank lines are ignored. if (buflen > 0) { buffer[buflen] = '\0'; buflen = 0; digitalWrite(PIN_ACTIVITY, HIGH); // Turn on activity LED. processCommand(buffer); digitalWrite(PIN_ACTIVITY, LOW); // Turn off activity LED. } } else if (ch == 0x08) { // Backspace over the last character. if (buflen > 0) --buflen; } else if (buflen < (BUFFER_MAX - 1)) { // Add the character to the buffer after forcing to upper case. if (ch >= 'a' && ch <= 'z') buffer[buflen++] = ch - 'a' + 'A'; else buffer[buflen++] = ch; } lastActive = millis(); } else if (state != STATE_IDLE) { // Power off the programming socket if no activity for 2 seconds. // Normally the host will issue the "PWROFF" command, but if we are // operating in interactive mode or the host has crashed, then this // timeout will ensure that the system eventually enters safe mode. if ((millis() - lastActive) >= 2000) exitProgramMode(); } } void printHex1(unsigned int value) { if (value >= 10) Serial.print((char)('A' + value - 10)); else Serial.print((char)('0' + value)); } void printHex4(unsigned int word) { printHex1((word >> 12) & 0x0F); printHex1((word >> 8) & 0x0F); printHex1((word >> 4) & 0x0F); printHex1(word & 0x0F); } void printHex8(unsigned long word) { unsigned int upper = (unsigned int)(word >> 16); if (upper) printHex4(upper); printHex4((unsigned int)word); } void printProgString(const prog_char *str) { for (;;) { char ch = (char)(pgm_read_byte(str)); if (ch == '\0') break; Serial.print(ch); ++str; } } // PROGRAM_PIC_VERSION command. void cmdVersion(const char *args) { Serial.println("ProgramPIC 1.0"); } // Initialize device properties from the "devices" list and // print them to the serial port. Note: "dev" is in PROGMEM. void initDevice(const struct deviceInfo *dev) { // Update the global device details. programEnd = pgm_read_dword(&(dev->programSize)) - 1; configStart = pgm_read_dword(&(dev->configStart)); configEnd = configStart + pgm_read_word(&(dev->configSize)) - 1; dataStart = pgm_read_dword(&(dev->dataStart)); dataEnd = dataStart + pgm_read_word(&(dev->dataSize)) - 1; reservedStart = programEnd - pgm_read_word(&(dev->reservedWords)) + 1; reservedEnd = programEnd; configSave = pgm_read_word(&(dev->configSave)); progFlashType = pgm_read_byte(&(dev->progFlashType)); dataFlashType = pgm_read_byte(&(dev->dataFlashType)); // Print the extra device information. Serial.print("DeviceName: "); printProgString((const prog_char *)(pgm_read_word(&(dev->name)))); Serial.println(); Serial.print("ProgramRange: 0000-"); printHex8(programEnd); Serial.println(); Serial.print("ConfigRange: "); printHex8(configStart); Serial.print('-'); printHex8(configEnd); Serial.println(); if (configSave != 0) { Serial.print("ConfigSave: "); printHex4(configSave); Serial.println(); } Serial.print("DataRange: "); printHex8(dataStart); Serial.print('-'); printHex8(dataEnd); Serial.println(); if (reservedStart <= reservedEnd) { Serial.print("ReservedRange: "); printHex8(reservedStart); Serial.print('-'); printHex8(reservedEnd); Serial.println(); } } // Offsets of interesting config locations that contain device information. #define DEV_USERID0 0 #define DEV_USERID1 1 #define DEV_USERID2 2 #define DEV_USERID3 3 #define DEV_ID 6 #define DEV_CONFIG_WORD 7 // DEVICE command. void cmdDevice(const char *args) { // Make sure the device is reset before we start. exitProgramMode(); // Read identifiers and configuration words from config memory. unsigned int userid0 = readConfigWord(DEV_USERID0); unsigned int userid1 = readConfigWord(DEV_USERID1); unsigned int userid2 = readConfigWord(DEV_USERID2); unsigned int userid3 = readConfigWord(DEV_USERID3); unsigned int deviceId = readConfigWord(DEV_ID); unsigned int configWord = readConfigWord(DEV_CONFIG_WORD); // If the device ID is all-zeroes or all-ones, then it could mean // one of the following: // // 1. There is no PIC in the programming socket. // 2. The VPP programming voltage is not available. // 3. Code protection is enabled and the PIC is unreadable. // 4. The PIC is an older model with no device identifier. // // Case 4 is the interesting one. We look for any word in configuration // memory or the first 16 words of program memory that is non-zero. // If we find a non-zero word, we assume that we have a PIC but we // cannot detect what type it is. if (deviceId == 0 || deviceId == 0x3FFF) { unsigned int word = userid0 | userid1 | userid2 | userid3 | configWord; unsigned int addr = 0; while (!word && addr < 16) { word |= readWord(addr); ++addr; } if (!word) { Serial.println("ERROR"); exitProgramMode(); return; } deviceId = 0; } Serial.println("OK"); Serial.print("DeviceID: "); printHex4(deviceId); Serial.println(); // Find the device in the built-in list if we have details for it. int index = 0; for (;;) { const prog_char *name = (const prog_char *) (pgm_read_word(&(devices[index].name))); if (!name) { index = -1; break; } int id = pgm_read_word(&(devices[index].deviceId)); if (id == (deviceId & 0xFFE0)) break; ++index; } if (index >= 0) { initDevice(&(devices[index])); } else { // Reset the global parameters to their defaults. A separate // "SETDEVICE" command will be needed to set the correct values. programEnd = 0x07FF; configStart = 0x2000; configEnd = 0x2007; dataStart = 0x2100; dataEnd = 0x217F; reservedStart = 0x0800; reservedEnd = 0x07FF; configSave = 0x0000; progFlashType = FLASH4; dataFlashType = EEPROM; } Serial.print("ConfigWord: "); printHex4(configWord); Serial.println(); Serial.println("."); // Don't need programming mode once the details have been read. exitProgramMode(); } // DEVICES command. void cmdDevices(const char *args) { Serial.println("OK"); int index = 0; for (;;) { const prog_char *name = (const prog_char *) (pgm_read_word(&(devices[index].name))); if (!name) break; if (index > 0) { Serial.print(','); if ((index % 6) == 0) Serial.println(); else Serial.print(' '); } printProgString(name); int id = (int)(pgm_read_word(&(devices[index].deviceId))); if (id != -1) Serial.print('*'); ++index; } Serial.println(); Serial.println("."); } // SETDEVICE command. void cmdSetDevice(const char *args) { // Extract the name of the device from the command arguments. int len = 0; for (;;) { char ch = args[len]; if (ch == '\0' || ch == ' ' || ch == '\t') break; ++len; } // Look for the name in the devices list. int index = 0; for (;;) { const prog_char *name = (const prog_char *) (pgm_read_word(&(devices[index].name))); if (!name) break; if (matchString(name, args, len)) { Serial.println("OK"); initDevice(&(devices[index])); Serial.println("."); exitProgramMode(); // Force a reset upon the next command. return; } ++index; } Serial.println("ERROR"); } int parseHex(const char *args, unsigned long *value) { int size = 0; *value = 0; for (;;) { char ch = *args; if (ch >= '0' && ch <= '9') *value = (*value << 4) | (ch - '0'); else if (ch >= 'A' && ch <= 'F') *value = (*value << 4) | (ch - 'A' + 10); else if (ch >= 'a' && ch <= 'f') *value = (*value << 4) | (ch - 'a' + 10); else break; ++size; ++args; } if (*args != '\0' && *args != '-' && *args != ' ' && *args != '\t') return 0; return size; } // Parse a range of addresses of the form START or START-END. bool parseRange(const char *args, unsigned long *start, unsigned long *end) { int size = parseHex(args, start); if (!size) return false; args += size; while (*args == ' ' || *args == '\t') ++args; if (*args != '-') { *end = *start; return true; } ++args; while (*args == ' ' || *args == '\t') ++args; if (!parseHex(args, end)) return false; return *end >= *start; } bool parseCheckedRange(const char *args, unsigned long *start, unsigned long *end) { // Parse the basic values and make sure that start <= end. if (!parseRange(args, start, end)) return false; // Check that both start and end are within the same memory area // and within the bounds of that memory area. if (*start <= programEnd) { if (*end > programEnd) return false; } else if (*start >= configStart && *start <= configEnd) { if (*end < configStart || *end > configEnd) return false; } else if (*start >= dataStart && *start <= dataEnd) { if (*end < dataStart || *end > dataEnd) return false; } else { return false; } return true; } // READ command. void cmdRead(const char *args) { unsigned long start; unsigned long end; if (!parseCheckedRange(args, &start, &end)) { Serial.println("ERROR"); return; } Serial.println("OK"); int count = 0; bool activity = true; while (start <= end) { unsigned int word = readWord(start); if (count > 0) { if ((count % 8) == 0) Serial.println(); else Serial.print(' '); } printHex4(word); ++start; ++count; if ((count % 32) == 0) { // Toggle the activity LED to make it blink during long reads. activity = !activity; if (activity) digitalWrite(PIN_ACTIVITY, HIGH); else digitalWrite(PIN_ACTIVITY, LOW); } } Serial.println(); Serial.println("."); } // READBIN command. void cmdReadBinary(const char *args) { unsigned long start; unsigned long end; if (!parseCheckedRange(args, &start, &end)) { Serial.println("ERROR"); return; } Serial.println("OK"); int count = 0; bool activity = true; size_t offset = 0; while (start <= end) { unsigned int word = readWord(start); buffer[++offset] = (char)word; buffer[++offset] = (char)(word >> 8); if (offset >= BINARY_TRANSFER_MAX) { // Buffer is full - flush it to the host. buffer[0] = (char)offset; Serial.write((const uint8_t *)buffer, offset + 1); offset = 0; } ++start; ++count; if ((count % 64) == 0) { // Toggle the activity LED to make it blink during long reads. activity = !activity; if (activity) digitalWrite(PIN_ACTIVITY, HIGH); else digitalWrite(PIN_ACTIVITY, LOW); } } if (offset > 0) { // Flush the final packet before the terminator. buffer[0] = (char)offset; Serial.write((const uint8_t *)buffer, offset + 1); } // Write the terminator (a zero-length packet). Serial.write((uint8_t)0x00); } const char s_force[] PROGMEM = "FORCE"; // WRITE command. void cmdWrite(const char *args) { unsigned long addr; unsigned long limit; unsigned long value; int size; // Was the "FORCE" option given? int len = 0; while (args[len] != '\0' && args[len] != ' ' && args[len] != '\t') ++len; bool force = matchString(s_force, args, len); if (force) { args += len; while (*args == ' ' || *args == '\t') ++args; } size = parseHex(args, &addr); if (!size) { Serial.println("ERROR"); return; } args += size; if (addr <= programEnd) { limit = programEnd; } else if (addr >= configStart && addr <= configEnd) { limit = configEnd; } else if (addr >= dataStart && addr <= dataEnd) { limit = dataEnd; } else { // Address is not within one of the valid ranges. Serial.println("ERROR"); return; } int count = 0; for (;;) { while (*args == ' ' || *args == '\t') ++args; if (*args == '\0') break; if (*args == '-') { Serial.println("ERROR"); return; } size = parseHex(args, &value); if (!size) { Serial.println("ERROR"); return; } args += size; if (addr > limit) { // We've reached the limit of this memory area, so fail. Serial.println("ERROR"); return; } if (!force) { if (!writeWord(addr, (unsigned int)value)) { // The actual write to the device failed. Serial.println("ERROR"); return; } } else { if (!writeWordForced(addr, (unsigned int)value)) { // The actual write to the device failed. Serial.println("ERROR"); return; } } ++addr; ++count; } if (!count) { // Missing word argument. Serial.println("ERROR"); } else { Serial.println("OK"); } } // Blocking serial read for use by WRITEBIN. int readBlocking() { while (!Serial.available()) ; // Do nothing. return Serial.read(); } // WRITEBIN command. void cmdWriteBinary(const char *args) { unsigned long addr; unsigned long limit; int size; // Was the "FORCE" option given? int len = 0; while (args[len] != '\0' && args[len] != ' ' && args[len] != '\t') ++len; bool force = matchString(s_force, args, len); if (force) { args += len; while (*args == ' ' || *args == '\t') ++args; } size = parseHex(args, &addr); if (!size) { Serial.println("ERROR"); return; } args += size; if (addr <= programEnd) { limit = programEnd; } else if (addr >= configStart && addr <= configEnd) { limit = configEnd; } else if (addr >= dataStart && addr <= dataEnd) { limit = dataEnd; } else { // Address is not within one of the valid ranges. Serial.println("ERROR"); return; } Serial.println("OK"); int count = 0; bool activity = true; for (;;) { // Read in the next binary packet. int len = readBlocking(); while (len == 0x0A && count == 0) { // Skip 0x0A bytes before the first packet as they are // probably part of a CRLF pair rather than a packet length. len = readBlocking(); } // Stop if we have a zero packet length - end of upload. if (!len) break; // Read the contents of the packet from the serial input stream. int offset = 0; while (offset < len) { if (offset < BINARY_TRANSFER_MAX) { buffer[offset++] = (char)readBlocking(); } else { readBlocking(); // Packet is too big - discard extra bytes. ++offset; } } // Write the words to memory. for (int posn = 0; posn < (len - 1); posn += 2) { if (addr > limit) { // We've reached the limit of this memory area, so fail. Serial.println("ERROR"); return; } unsigned int value = (((unsigned int)buffer[posn]) & 0xFF) | ((((unsigned int)buffer[posn + 1]) & 0xFF) << 8); if (!force) { if (!writeWord(addr, (unsigned int)value)) { // The actual write to the device failed. Serial.println("ERROR"); return; } } else { if (!writeWordForced(addr, (unsigned int)value)) { // The actual write to the device failed. Serial.println("ERROR"); return; } } ++addr; ++count; if ((count % 24) == 0) { // Toggle the activity LED to make it blink during long writes. activity = !activity; if (activity) digitalWrite(PIN_ACTIVITY, HIGH); else digitalWrite(PIN_ACTIVITY, LOW); } } // All words in this packet have been written successfully. Serial.println("OK"); } Serial.println("OK"); } const char s_noPreserve[] PROGMEM = "NOPRESERVE"; // ERASE command. void cmdErase(const char *args) { // Was the "NOPRESERVE" option given? int len = 0; while (args[len] != '\0' && args[len] != ' ' && args[len] != '\t') ++len; bool preserve = !matchString(s_noPreserve, args, len); // Preserve reserved words if necessary. unsigned int *reserved = 0; unsigned int configWord = 0x3FFF; if (preserve && reservedStart <= reservedEnd) { size_t size = ((size_t)(reservedEnd - reservedStart + 1)) * sizeof(unsigned int); reserved = (unsigned int *)malloc(size); if (reserved) { unsigned long addr = reservedStart; int offset = 0; while (addr <= reservedEnd) { reserved[offset] = readWord(addr); ++addr; ++offset; } } else { // If we cannot preserve the reserved words, then abort now. Serial.println("ERROR"); return; } } if (configSave != 0 && preserve) { // Some of the bits in the configuration word must also be saved. configWord &= ~configSave; configWord |= readWord(configStart + DEV_CONFIG_WORD) & configSave; } // Perform the memory type specific erase sequence. switch (progFlashType) { case FLASH4: setErasePC(); sendSimpleCommand(CMD_BULK_ERASE_PROGRAM); delayMicroseconds(DELAY_TERA); sendSimpleCommand(CMD_BULK_ERASE_DATA); break; case FLASH5: setErasePC(); sendSimpleCommand(CMD_CHIP_ERASE); break; default: // Details for disabling code protection and erasing all memory // for PIC16F84/PIC16F84A comes from this doc, section 4.1: // http://ww1.microchip.com/downloads/en/DeviceDoc/30262e.pdf setErasePC(); for (int count = 0; count < 7; ++count) sendSimpleCommand(CMD_INCREMENT_ADDRESS); // Advance to 0x2007 sendSimpleCommand(0x01); // Command 1 sendSimpleCommand(0x07); // Command 7 sendSimpleCommand(CMD_BEGIN_PROGRAM); delayMicroseconds(DELAY_TFULL84); sendSimpleCommand(0x01); // Command 1 sendSimpleCommand(0x07); // Command 7 // Some FLASH devices need the data memory to be erased separately. sendWriteCommand(CMD_LOAD_DATA_MEMORY, 0x3FFF); sendSimpleCommand(CMD_BULK_ERASE_DATA); sendSimpleCommand(CMD_BEGIN_PROGRAM); break; } // Wait until the chip is fully erased. delayMicroseconds(DELAY_TFULLERA); // Force the device to reset after it has been erased. exitProgramMode(); enterProgramMode(); // Write the reserved words back to program memory. if (reserved) { unsigned long addr = reservedStart; int offset = 0; bool ok = true; while (addr <= reservedEnd) { if (!writeWord(addr, reserved[offset])) ok = false; ++addr; ++offset; } free(reserved); if (!ok) { // Reserved words did not read back correctly. Serial.println("ERROR"); return; } } // Forcibly write 0x3FFF over the configuration words as erase // sometimes won't reset the words (e.g. PIC16F628A). If the // write fails, then leave the words as-is - don't report the failure. for (unsigned long configAddr = configStart + DEV_CONFIG_WORD; configAddr <= configEnd; ++configAddr) writeWordForced(configAddr, configWord); // Done. Serial.println("OK"); } // PWROFF command. void cmdPowerOff(const char *args) { exitProgramMode(); Serial.println("OK"); } // List of all commands that are understood by the programmer. typedef void (*commandFunc)(const char *args); typedef struct { const prog_char *name; commandFunc func; const prog_char *desc; const prog_char *args; } command_t; const char s_cmdRead[] PROGMEM = "READ"; const char s_cmdReadDesc[] PROGMEM = "Reads program and data words from device memory (text)"; const char s_cmdReadArgs[] PROGMEM = "STARTADDR[-ENDADDR]"; const char s_cmdReadBinary[] PROGMEM = "READBIN"; const char s_cmdReadBinaryDesc[] PROGMEM = "Reads program and data words from device memory (binary)"; const char s_cmdWrite[] PROGMEM = "WRITE"; const char s_cmdWriteDesc[] PROGMEM = "Writes program and data words to device memory (text)"; const char s_cmdWriteArgs[] PROGMEM = "STARTADDR WORD [WORD ...]"; const char s_cmdWriteBinary[] PROGMEM = "WRITEBIN"; const char s_cmdWriteBinaryDesc[] PROGMEM = "Writes program and data words to device memory (binary)"; const char s_cmdWriteBinaryArgs[] PROGMEM = "STARTADDR"; const char s_cmdErase[] PROGMEM = "ERASE"; const char s_cmdEraseDesc[] PROGMEM = "Erases the contents of program, configuration, and data memory"; const char s_cmdDevice[] PROGMEM = "DEVICE"; const char s_cmdDeviceDesc[] PROGMEM = "Probes the device and returns information about it"; const char s_cmdDevices[] PROGMEM = "DEVICES"; const char s_cmdDevicesDesc[] PROGMEM = "Returns a list of all supported device types"; const char s_cmdSetDevice[] PROGMEM = "SETDEVICE"; const char s_cmdSetDeviceDesc[] PROGMEM = "Sets a specific device type manually"; const char s_cmdSetDeviceArgs[] PROGMEM = "DEVTYPE"; const char s_cmdPowerOff[] PROGMEM = "PWROFF"; const char s_cmdPowerOffDesc[] PROGMEM = "Powers off the device in the programming socket"; const char s_cmdVersion[] PROGMEM = "PROGRAM_PIC_VERSION"; const char s_cmdVersionDesc[] PROGMEM = "Prints the version of ProgramPIC"; const char s_cmdHelp[] PROGMEM = "HELP"; const char s_cmdHelpDesc[] PROGMEM = "Prints this help message"; const command_t commands[] PROGMEM = { {s_cmdRead, cmdRead, s_cmdReadDesc, s_cmdReadArgs}, {s_cmdReadBinary, cmdReadBinary, s_cmdReadBinaryDesc, s_cmdReadArgs}, {s_cmdWrite, cmdWrite, s_cmdWriteDesc, s_cmdWriteArgs}, {s_cmdWriteBinary, cmdWriteBinary, s_cmdWriteBinaryDesc, s_cmdWriteBinaryArgs}, {s_cmdErase, cmdErase, s_cmdEraseDesc, 0}, {s_cmdDevice, cmdDevice, s_cmdDeviceDesc, 0}, {s_cmdDevices, cmdDevices, s_cmdDevicesDesc, 0}, {s_cmdSetDevice, cmdSetDevice, s_cmdSetDeviceDesc, s_cmdSetDeviceArgs}, {s_cmdPowerOff, cmdPowerOff, s_cmdPowerOffDesc, 0}, {s_cmdVersion, cmdVersion, s_cmdVersionDesc, 0}, {s_cmdHelp, cmdHelp, s_cmdHelpDesc, 0}, {0, 0} }; // "HELP" command. void cmdHelp(const char *args) { Serial.println("OK"); int index = 0; for (;;) { const prog_char *name = (const prog_char *) (pgm_read_word(&(commands[index].name))); if (!name) break; const prog_char *desc = (const prog_char *) (pgm_read_word(&(commands[index].desc))); const prog_char *args = (const prog_char *) (pgm_read_word(&(commands[index].args))); printProgString(name); if (args) { Serial.print(' '); printProgString(args); } Serial.println(); Serial.print(" "); printProgString(desc); Serial.println(); ++index; } Serial.println("."); } // Match a data-space string where the name comes from PROGMEM. bool matchString(const prog_char *name, const char *str, int len) { for (;;) { char ch1 = (char)(pgm_read_byte(name)); if (ch1 == '\0') return len == 0; else if (len == 0) break; if (ch1 >= 'a' && ch1 <= 'z') ch1 = ch1 - 'a' + 'A'; char ch2 = *str; if (ch2 >= 'a' && ch2 <= 'z') ch2 = ch2 - 'a' + 'A'; if (ch1 != ch2) break; ++name; ++str; --len; } return false; } // Process commands from the host. void processCommand(const char *buf) { // Skip white space at the start of the command. while (*buf == ' ' || *buf == '\t') ++buf; if (*buf == '\0') return; // Ignore blank lines. // Extract the command portion of the line. const char *cmd = buf; int len = 0; for (;;) { char ch = *buf; if (ch == '\0' || ch == ' ' || ch == '\t') break; ++buf; ++len; } // Skip white space after the command name and before the arguments. while (*buf == ' ' || *buf == '\t') ++buf; // Find the command and execute it. int index = 0; for (;;) { const prog_char *name = (const prog_char *) (pgm_read_word(&(commands[index].name))); if (!name) break; if (matchString(name, cmd, len)) { commandFunc func = (commandFunc)(pgm_read_word(&(commands[index].func))); (*func)(buf); return; } ++index; } // Unknown command. Serial.println("NOTSUPPORTED"); } // Enter high voltage programming mode. void enterProgramMode() { // Bail out if already in programming mode. if (state != STATE_IDLE) return; // Lower MCLR, VDD, DATA, and CLOCK initially. This will put the // PIC into the powered-off, reset state just in case. digitalWrite(PIN_MCLR, MCLR_RESET); digitalWrite(PIN_VDD, LOW); digitalWrite(PIN_DATA, LOW); digitalWrite(PIN_CLOCK, LOW); // Wait for the lines to settle. delayMicroseconds(DELAY_SETTLE); // Switch DATA and CLOCK into outputs. pinMode(PIN_DATA, OUTPUT); pinMode(PIN_CLOCK, OUTPUT); // Raise MCLR, then VDD. digitalWrite(PIN_MCLR, MCLR_VPP); delayMicroseconds(DELAY_TPPDP); digitalWrite(PIN_VDD, HIGH); delayMicroseconds(DELAY_THLD0); // Now in program mode, starting at the first word of program memory. state = STATE_PROGRAM; pc = 0; } // Exit programming mode and reset the device. void exitProgramMode() { // Nothing to do if already out of programming mode. if (state == STATE_IDLE) return; // Lower MCLR, VDD, DATA, and CLOCK. digitalWrite(PIN_MCLR, MCLR_RESET); digitalWrite(PIN_VDD, LOW); digitalWrite(PIN_DATA, LOW); digitalWrite(PIN_CLOCK, LOW); // Float the DATA and CLOCK pins. pinMode(PIN_DATA, INPUT); pinMode(PIN_CLOCK, INPUT); // Now in the idle state with the PIC powered off. state = STATE_IDLE; pc = 0; } // Send a command to the PIC. void sendCommand(byte cmd) { for (byte bit = 0; bit < 6; ++bit) { digitalWrite(PIN_CLOCK, HIGH); if (cmd & 1) digitalWrite(PIN_DATA, HIGH); else digitalWrite(PIN_DATA, LOW); delayMicroseconds(DELAY_TSET1); digitalWrite(PIN_CLOCK, LOW); delayMicroseconds(DELAY_THLD1); cmd >>= 1; } } // Send a command to the PIC that has no arguments. void sendSimpleCommand(byte cmd) { sendCommand(cmd); delayMicroseconds(DELAY_TDLY2); } // Send a command to the PIC that writes a data argument. void sendWriteCommand(byte cmd, unsigned int data) { sendCommand(cmd); delayMicroseconds(DELAY_TDLY2); for (byte bit = 0; bit < 16; ++bit) { digitalWrite(PIN_CLOCK, HIGH); if (data & 1) digitalWrite(PIN_DATA, HIGH); else digitalWrite(PIN_DATA, LOW); delayMicroseconds(DELAY_TSET1); digitalWrite(PIN_CLOCK, LOW); delayMicroseconds(DELAY_THLD1); data >>= 1; } delayMicroseconds(DELAY_TDLY2); } // Send a command to the PIC that reads back a data value. unsigned int sendReadCommand(byte cmd) { unsigned int data = 0; sendCommand(cmd); digitalWrite(PIN_DATA, LOW); pinMode(PIN_DATA, INPUT); delayMicroseconds(DELAY_TDLY2); for (byte bit = 0; bit < 16; ++bit) { data >>= 1; digitalWrite(PIN_CLOCK, HIGH); delayMicroseconds(DELAY_TDLY3); if (digitalRead(PIN_DATA)) data |= 0x8000; digitalWrite(PIN_CLOCK, LOW); delayMicroseconds(DELAY_THLD1); } pinMode(PIN_DATA, OUTPUT); delayMicroseconds(DELAY_TDLY2); return data; } // Set the program counter to a specific "flat" address. void setPC(unsigned long addr) { if (addr >= dataStart && addr <= dataEnd) { // Data memory. addr -= dataStart; if (state != STATE_PROGRAM || addr < pc) { // Device is off, currently looking at configuration memory, // or the address is further back. Reset the device. exitProgramMode(); enterProgramMode(); } } else if (addr >= configStart && addr <= configEnd) { // Configuration memory. addr -= configStart; if (state == STATE_IDLE) { // Enter programming mode and switch to config memory. enterProgramMode(); sendWriteCommand(CMD_LOAD_CONFIG, 0); state = STATE_CONFIG; } else if (state == STATE_PROGRAM) { // Switch from program memory to config memory. sendWriteCommand(CMD_LOAD_CONFIG, 0); state = STATE_CONFIG; pc = 0; } else if (addr < pc) { // Need to go backwards in config memory, so reset the device. exitProgramMode(); enterProgramMode(); sendWriteCommand(CMD_LOAD_CONFIG, 0); state = STATE_CONFIG; } } else { // Program memory. if (state != STATE_PROGRAM || addr < pc) { // Device is off, currently looking at configuration memory, // or the address is further back. Reset the device. exitProgramMode(); enterProgramMode(); } } while (pc < addr) { sendSimpleCommand(CMD_INCREMENT_ADDRESS); ++pc; } } // Sets the PC for "erase mode", which is activated by loading the // data value 0x3FFF into location 0 of configuration memory. void setErasePC() { // Forcibly reset the device so we know what state it is in. exitProgramMode(); enterProgramMode(); // Load 0x3FFF for the configuration. sendWriteCommand(CMD_LOAD_CONFIG, 0x3FFF); state = STATE_CONFIG; } // Read a word from memory (program, config, or data depending upon addr). // The start and stop bits will be stripped from the raw value from the PIC. unsigned int readWord(unsigned long addr) { setPC(addr); if (addr >= dataStart && addr <= dataEnd) return (sendReadCommand(CMD_READ_DATA_MEMORY) >> 1) & 0x00FF; else return (sendReadCommand(CMD_READ_PROGRAM_MEMORY) >> 1) & 0x3FFF; } // Read a word from config memory using relative, non-flat, addressing. // Used by the "DEVICE" command to fetch information about devices whose // flat address ranges are presently unknown. unsigned int readConfigWord(unsigned long addr) { if (state == STATE_IDLE) { // Enter programming mode and switch to config memory. enterProgramMode(); sendWriteCommand(CMD_LOAD_CONFIG, 0); state = STATE_CONFIG; } else if (state == STATE_PROGRAM) { // Switch from program memory to config memory. sendWriteCommand(CMD_LOAD_CONFIG, 0); state = STATE_CONFIG; pc = 0; } else if (addr < pc) { // Need to go backwards in config memory, so reset the device. exitProgramMode(); enterProgramMode(); sendWriteCommand(CMD_LOAD_CONFIG, 0); state = STATE_CONFIG; } while (pc < addr) { sendSimpleCommand(CMD_INCREMENT_ADDRESS); ++pc; } return (sendReadCommand(CMD_READ_PROGRAM_MEMORY) >> 1) & 0x3FFF; } // Begin a programming cycle, depending upon the type of flash being written. void beginProgramCycle(unsigned long addr, bool isData) { switch (isData ? dataFlashType : progFlashType) { case FLASH: case EEPROM: sendSimpleCommand(CMD_BEGIN_PROGRAM); delayMicroseconds(DELAY_TDPROG + DELAY_TERA); break; case FLASH4: sendSimpleCommand(CMD_BEGIN_PROGRAM); delayMicroseconds(DELAY_TPROG); break; case FLASH5: sendSimpleCommand(CMD_BEGIN_PROGRAM_ONLY); delayMicroseconds(DELAY_TPROG5); sendSimpleCommand(CMD_END_PROGRAM_ONLY); break; } } // Write a word to memory (program, config, or data depending upon addr). // Returns true if the write succeeded, false if read-back failed to match. bool writeWord(unsigned long addr, unsigned int word) { unsigned int readBack; setPC(addr); if (addr >= dataStart && addr <= dataEnd) { word &= 0x00FF; sendWriteCommand(CMD_LOAD_DATA_MEMORY, word << 1); beginProgramCycle(addr, true); readBack = sendReadCommand(CMD_READ_DATA_MEMORY); readBack = (readBack >> 1) & 0x00FF; } else if (!configSave || addr != (configStart + DEV_CONFIG_WORD)) { word &= 0x3FFF; sendWriteCommand(CMD_LOAD_PROGRAM_MEMORY, word << 1); beginProgramCycle(addr, false); readBack = sendReadCommand(CMD_READ_PROGRAM_MEMORY); readBack = (readBack >> 1) & 0x3FFF; } else { // The configuration word has calibration bits within it that // must be preserved when we write to it. Read the current value // and preserve the necessary bits. readBack = (sendReadCommand(CMD_READ_PROGRAM_MEMORY) >> 1) & 0x3FFF; word = (readBack & configSave) | (word & 0x3FFF & ~configSave); sendWriteCommand(CMD_LOAD_PROGRAM_MEMORY, word << 1); beginProgramCycle(addr, false); readBack = sendReadCommand(CMD_READ_PROGRAM_MEMORY); readBack = (readBack >> 1) & 0x3FFF; } return readBack == word; } // Force a word to be written even if it normally would protect config bits. bool writeWordForced(unsigned long addr, unsigned int word) { unsigned int readBack; setPC(addr); if (addr >= dataStart && addr <= dataEnd) { word &= 0x00FF; sendWriteCommand(CMD_LOAD_DATA_MEMORY, word << 1); beginProgramCycle(addr, true); readBack = sendReadCommand(CMD_READ_DATA_MEMORY); readBack = (readBack >> 1) & 0x00FF; } else { word &= 0x3FFF; sendWriteCommand(CMD_LOAD_PROGRAM_MEMORY, word << 1); beginProgramCycle(addr, false); readBack = sendReadCommand(CMD_READ_PROGRAM_MEMORY); readBack = (readBack >> 1) & 0x3FFF; } return readBack == word; }
создал тему, пока качалась версия IDE 1.0.5. На ней скомпилировалось. Если удастся залить hex в пик при помощи дуни, отпишусь
собрал всё по схеме - ВСЁ работает!!! Загрузил блинк
схема
MaksVV - просто интересно - а зачем в наше время нужны ПИКи? - они ж во всем сливают соответствующим АВР-кам
у меня от дядьки осталось вагон пиков)
b707, знаю как минимум одну фишку, которой нет в AVR. -у PICов есть асинхронный счётчик, и он может считать импульсы с частотами сильно выше собственной тактовой. Поэтому всё мало-мальски серьёзные частотометры делают на пиках. Ещё на некоторые популярные пики есть полностью переведённый на русский даташит, мелочь как грится, но приятно)
просто есть готовое устройство к повторению. Я бы с радостью переделал на AVR, но исходник никто не выложил. Я и так полгода собирался его сделать, только пик и останавливал)) Вот щас плату делаю. FTDI учиться паять надо, мелко всё это, однако, для ЛУТ.
это адаптер для диагностики подогревателей Eberspacher.
просто есть готовое устройство к повторению.
ну да, я так и предполагал. Для Пиков можно найти кучу полезных прошивок в инете...
И если что - я не наезжаю на ПИК. спросил именно из любопытства :)
собрал всё по схеме - ВСЁ работает!!! Загрузил блинк
схема
подключаю как написано в скетче, ничего не происходит, помоги пожалуйста, не могу ответ найти второй вечер
что не происходит. программа горит зелёным? сом или connect? внимательнее проверьте схему подключения
13 вольт через транзистор нужно?
я 12 подавал, да, через транзистор. Светодиод не подключал.
схема вроде как такая должна быть.
Спасибо, уже понижайку настроил от ноутбучного блока питания, вечером попробую.
Erase не помогает, куда копать?
вроде прошивка залилась, но в окне одни нули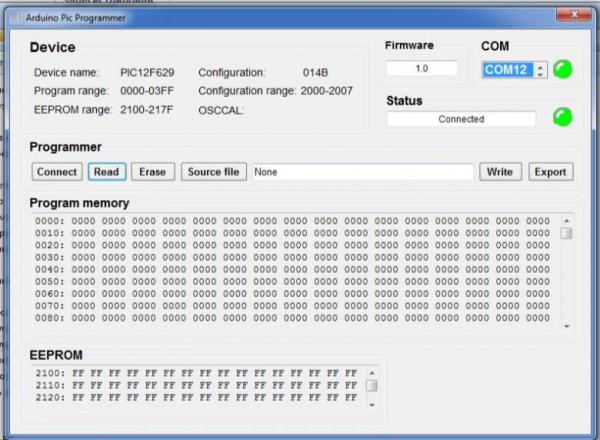
может где не контачит, нули не должны. Может это erase прошёл
полсе erase там 3FFF
или имя файла не выбрали и он пустоту с нулями залил.
залил блинк, диод не покдлючал, но видно что код залился.
а это уже файл прошивки, который нужно прошить
подал на pic ровно 13 вольт, читал что это может быть защита от чтения, мало верится
Непонятно , дак всё таки получилось или нет?
нет, не работает в устройстве, думаю собирать програматор для COM порта
дак блинк ведь загрузился. Проверьте с реальным диодом. Если будет мигать и всё норм, то прошивка с проектом у вас корявая , наверное. посмотрите её в НЕХ редакторе, какие там байты
Прошу помощи народ, кто шарит в прошивке PIC-ов. Нужно прошить 18F25k50, в списке поддерживаемых микросхем на гитхабе этого контроллера нет. Как я понял принцип программирования пиков по сути идентичен (в основном), может можно добавить поддержку нужного мне чипа?
Точно такая же проблема. Write error to device-Please erase device first, надыбал исходники этой программы на VB. вроде как связано с самим хекс файлом. Решил проблему с этим? Я пробовал нажимать reset на прошивающей ардуино. Но он вроде начинает заливать, но потом останавливается и уходит в бутлуп, но проивка не заливается.
Точно такая же проблема. Write error to device-Please erase device first, надыбал исходники этой программы на VB. вроде как связано с самим хекс файлом. Решил проблему с этим? Я пробовал нажимать reset на прошивающей ардуино. Но он вроде начинает заливать, но потом останавливается и уходит в бутлуп, но проивка не заливается.
это адаптер для диагностики подогревателей Eberspacher.
какая последовательность действий при прошивки? Для чего кнопка reset используется ардуиновская?? нигде не нашел описание у них на сайте для чего она нужна.
на сколько помню не нажимал я ресет на ардуине. Все так шьётся, по клику в проге.
Просто у них на сайте есть два варианта схемы,один вариант без кнопки ресет и двух индикаторных светодиодов дополнительных, а второй вариант с ними. Второй вариант, который у вас для новой версии. Предполагаю, что для новой версии , где уже указаны новые контроллеры,это и нужно. У меня PIC16F877.. Версия скетча 1.8. Для версии 1.0 он вообще не работал В списке скетча он есть, и он определяется, считывается и даже вроде как стирается, но при записи выдает вот эту ошибку сразу "Write error to device - Please erase device first!" . Если же зажать кнопку ресет на некоторое время, то он начинает показывать, что будто бы записывает, НО ОООчень медленно. Отпускаешь кнопку и он вроде опять как продолжает записывать, но через какое-то время просто уходит в бутлуп, а прога не записывается, контроллер чист. Контроллер причем новый.
Прошу помощи народ, кто шарит в прошивке PIC-ов. Нужно прошить 18F25k50, в списке поддерживаемых микросхем на гитхабе этого контроллера нет. Как я понял принцип программирования пиков по сути идентичен (в основном), может можно добавить поддержку нужного мне чипа?
Зайдите в любой сервисный центр, наверняка зашьют, там чипрогами пользуются
А добавлять новые чипы видимо придётся в нескольких местах и не только в прошивке
но и в программе управления
это версия 1.0. на их сайте в гите есть версия 1.8
на сколько помню не нажимал я ресет на ардуине. Все так шьётся, по клику в проге.
пробовал через командную строку слить хекс файл. вышел файл почти весь в нулях размеров 47 кб. ОБратно он заливается, но если произвести изменения в файле (вставить строчки из компилированного кода), то при прошивке выдаётся ошибка. Причем по контрольной сумме всё правильно. Я даже пробовал через последовательное соединение , как у них на сайте. Также отправляются команды на запись нулей по адресам, другие значения записать невозможно. Единственное , что могу считать идентификатор устройства, который соответствует моему контроллеру. Пробовал даже менять формат хекс файла с int32 на int8 через hexmate. пробовал другой компилятор: мплабх, хитек. Подозрения, что считывает ,записывает и стирает он неправильно, учитывая, что он считывает только нулю со всех областей:программной памяти, еепром, конфигурационной памяти. Причем ,если отключить питание от МСЛР, то он также считывает нули, но вот конфигурацию устройства уже не покажет. Либо контроллер паленый либо в коде ошибка или всё-таки он не поддерживает прошивку этого устройства pic16f877, хотя он указан в ардуиновском файле,и автоматически определяется. Код верный в обоих случаях-проверял хекс файл через протеус на том же контроллере.
это версия 1.0. на их сайте в гите есть версия 1.8
а киньте ссылкой пожалуйста
https://codeload.github.com/makerprojects/ProgramPic/zip/master
https://codeload.github.com/makerprojects/ProgramPic/zip/master
Благодарю!
Посмотрел, из изменений добавили пяток чипов и компиляцию в IDE 1.8.7
PIC серии 18 в поддерживаемых нет, увы (((
Если вы хотите прошивать 18 серию, то советую такое решение с низковольтным программированием, но старые контроллеры он уже поддерживать не будет) https://hackaday.io/project/8559-microchip-pic-arduino-based-programmer/
https://sites.google.com/site/thehighspark/arduino-pic18f -есть пример прошивки микроконтроллеров семейства pic18
всё на буржуйском языке, но рисунки хорошие и так понять можно
https://sites.google.com/site/thehighspark/arduino-pic18f -есть пример прошивки микроконтроллеров семейства pic18
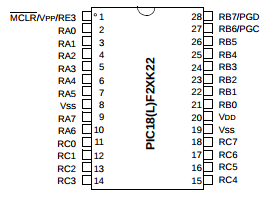
Спасибо за интересную статью и ресурс. Хочу попробовать этим методом прошить PIC18F24K22 прям на плате. На плате есть пять контактов для внутрисхемного программирования: 1. PROG (я так понимаю MCLR); 2. 5V (VDD); 3. GND (VSS); 4. PGD; 5. PGC.
В предложенном скетче для Ардуино используется ещё шестой контакт 6. PGM, так как он имеется на PIC18F2420 описанном в примере. А у микроконтроллера PIC18F24K22 такой контакт отсутствует!
Вопрос, как Вы считаете нужно ли вносить изменения в скетч для Ардуино, для того чтобы корректно прошить PIC18F24K22?
Пытался запустить этот программатор. То прочитает чип, то нет. Стирать не получается. Плюнул буду искать готовое изделие...
буду искать готовое изделие...
Найди TL866
Почему у меня при переходе по ссылке на статью автора пишет что отказано в доступе к серверу?
На сегодня ссылка вообще работает?
Или скиньте кто нибудь саму программу для прошивки
Или скиньте кто нибудь саму программу для прошивки
здесь посмотри
Найди TL866
З. Ы. Заранее благодарен
А всякие pinguino и так далее чем не устраивают? Я как бы pic-контроллерами никогда не занимался, но сейчас гугл открыл с запросом «pic arduino ide» и там море всего.