Помогите. Что не так сделал. Новичок
- Войдите на сайт для отправки комментариев
Вс, 15/11/2015 - 11:34
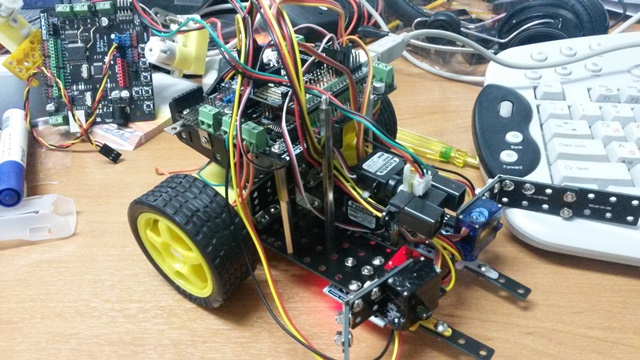
Что не так сделали, робот уборщик не работает.
1. DFrduino Romeo 1.1
2. Дальномер Sharp 2Y0A22 пин 0
3. ИК датчик линии аналоговые 2 шт пин 1, 2
4. сервоприводы 4 шт.
5. Моторы
#include <Servo.h>
Servo myservo0; // назначаем вывод 1 сервы
Servo myservo1; // назначаем вывод 2 сервы
Servo myservo2; // назначаем вывод 3 сервы
// Моторы подключаются к клеммам M1+,M1-,M2+,M2-
// Motor shield использует четыре контакта 6,5,7,4 для управления моторами
#define SPEED_LEFT 6
#define SPEED_RIGHT 5
#define DIR_LEFT 7
#define DIR_RIGHT 4
#define SENSOR_PIN 1
int i;
int j;
int p[18]; // массив, здесь будем записывать данные с ИК дальномера
int gp,gp1,gp2,g;
int b;
int pos = 0;
// Скорость, с которой мы движемся вперёд (0-255)
#define SPEED 100
// Скорость прохождения сложных участков
#define SLOW_SPEED 35
#define BACK_SLOW_SPEED 30
#define BACK_FAST_SPEED 50
// Коэффициент, задающий во сколько раз нужно затормозить
// одно из колёс для поворота
#define BRAKE_K 4
#define STATE_FORWARD 0
#define STATE_RIGHT 1
#define STATE_LEFT 2
#define STATE_BACK 3
#define SPEED_STEP 2
#define FAST_TIME_THRESHOLD 500
int state = STATE_FORWARD;
int currentSpeed = SPEED;
int fastTime = 0;
void Forward()
{
state = STATE_FORWARD;
fastTime += 1;
if (fastTime < FAST_TIME_THRESHOLD) {
currentSpeed = SLOW_SPEED;
} else {
currentSpeed = min(currentSpeed + SPEED_STEP, SPEED);
}
analogWrite(SPEED_LEFT, currentSpeed);
analogWrite(SPEED_RIGHT, currentSpeed);
digitalWrite(DIR_LEFT, HIGH);
digitalWrite(DIR_RIGHT, HIGH);
}
void Spin_Right()
{
state = STATE_RIGHT;
fastTime = 0;
// Замедляем правое колесо относительно левого,
// чтобы начать поворот
analogWrite(SPEED_RIGHT, 0);
analogWrite(SPEED_LEFT, SPEED);
digitalWrite(DIR_LEFT, HIGH);
digitalWrite(DIR_RIGHT, HIGH);
}
void Spin_Left()
{
state = STATE_LEFT;
fastTime = 0;
analogWrite(SPEED_LEFT, 0);
analogWrite(SPEED_RIGHT, SPEED);
digitalWrite(DIR_LEFT, HIGH);
digitalWrite(DIR_RIGHT, HIGH);
}
void Backward()
{
state = STATE_BACK;
fastTime = 0;
analogWrite(SPEED_LEFT, SPEED);
analogWrite(SPEED_RIGHT, SPEED);
digitalWrite(DIR_LEFT, LOW);
digitalWrite(DIR_RIGHT, LOW);
}
void motorStop(){ // Подпрограмма остановки мотора
digitalWrite(DIR_LEFT,HIGH);
digitalWrite(DIR_RIGHT,HIGH);
}
void motorRun(){ // Подпрограмма запуска мотора
digitalWrite(DIR_LEFT,LOW);
digitalWrite(DIR_RIGHT,LOW);
}
void setup()
{
// устанавливаем пин как вывод управления сервой
myservo0.attach(6); // назначаем порты для 1 сервы
myservo1.attach(6); // назначаем порты для 2 сервы
myservo2.attach(5); // назначаем порты для 3 сервы
// Настраивает выводы платы 4,5,6,7 на вывод сигналов
for(int i = 4; i <= 7; i++)
pinMode(i, OUTPUT);
}
void loop()
{
myservo1.write(15); // раскрываем лапки
delay(100);
myservo2.write(160); // раскрываем лапки
delay(100);
myservo0.write(0);
delay(200);
j=0;
for (j=0;j<18;j++){ // для j от 0 до 18
myservo0.write(j*10); // вращение сервы по 10 градусов
gp=analogRead(0); // считываем данные с ИК радара
delay(50);
p[j]=gp; // записываем это значение в массив
Serial.println(p[j]); // выводим на экран
gp2=(analogRead(2)); // считываем значение датчиков плоскости
gp1=(analogRead(1));
g=min(gp1,gp2); // выбираем минимальное значение из двух
if (g<4){ // Если значение близко к 0, то отходим назад и разворачиваемся
motorRun();
Backward();
delay(500);
Spin_Left();
delay(600);
motorStop();
}
if (p[j]<160){ // если значение с дальномера меньше 150, (примерно 25 см.), то шаг вперед
motorRun();
Forward();
delay (50);
motorStop();}
else { // Иначе
//digitalWrite(ledPin1, HIGH); // нажимаем кнопку перемотка
//delay(100);
//digitalWrite(ledPin1, LOW); // отпускаем кнопку перемотка
//delay(100);
myservo0.write(90); // поворачиваем голову вперед
delay(200);
gp=analogRead(0); // считываем данные с ИК радара
Serial.println(gp);
while(gp<160){ // поворачиваемся, пока не заметим предмет
motorRun();
if (j>9){ // если предмет с лева, то
Spin_Left();// поворот в сторону объекта
}
else { // иначе поворот вправо
Spin_Right();
}
delay (10);
motorStop();
gp=analogRead(0); // считываем данные с ИК радара
delay(50);
}
gp=analogRead(0); // считываем данные с ИК радара
delay(50);
while(gp<400){ //Двигаемся вперед пока предмет не будет на расстоянии 10 см.
motorRun();
Forward(); // движение до объекта
delay (50); // время движения
motorStop();
gp=analogRead(0); // считываем данные с ИК радара
delay(50);
}
myservo0.write(0); // убираем голову в сторону, чтобы она не мешала захвату предмета и транспортировке
delay(100);
motorRun();
Forward(); // движение до объекта
delay (700); // время движения
motorStop();
myservo1.write(140); // захват первой лапой
delay(500);
myservo2.write(15); // захват второй лапой
delay(100);
gp2=(analogRead(2));
gp1=(analogRead(1));
g=min(gp1,gp2);
while(g>4) // движение после захвата до конца плоскости.
{
gp2=(analogRead(2));
gp1=(analogRead(1));
Serial.println(gp2);
g=min(gp1,gp2);
motorRun();
Forward();
delay(5);
motorStop();}
myservo1.write(15); // раскрываем лапки
delay(100);
myservo2.write(160); // раскрываем лапки
delay(100);
//digitalWrite(ledPin, HIGH); // нажимаем кнопку стоп
//delay(150);
//digitalWrite(ledPin, LOW); // отпускаем кнопку стоп
//delay(100);
motorRun();
Backward();
delay(100);
Spin_Right();
delay(600);
}
}
}
вы бы сначала описали что должно получится и как с этим кодом работает
хотели скопировать с этого
http://arduino.ru/forum/proekty/arduino-robot-dlya-nachinayushchikh
вам лень три слова написать, а кто то должен по вашим ссылкам лазить и коды разбирать.
нафиг это кому нужно....
Времени просто не было.
Робот должен найти банки из под сока хватает и отпускает на крае стола и сам должен не упась со стола