Сделать схему и написать программу управления
- Войдите на сайт для отправки комментариев
Чт, 01/08/2019 - 08:51
Есть модель канатной дороги.
Необходимо сделать так, чтобы тележка канатной дороги перемещалась из одной точки в другую, а потом возвращалась назад. И так в бесконечном цикле. В крайних точках тележка должна останавливать и время остановки можно менять. Остановка должна происходить при касании тележки микропереключателя (их должно быть по одному в крайних положениях).
Из компонентов есть маленький мотор-редуктор (проверяли, его мощности хватает для работы).

И плата управления этим мотором.
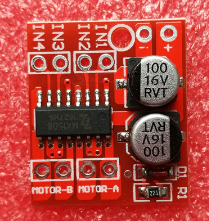
Фото взял в интернете, но они совпадают с тем, что есть у меня.
Управление при помощи Ардуино нано.
Предложения на почту morrom2007@yandex.ru
Немного непонятно. Вам нужно нарисовать схему и написать прошивку, или предоставить прошитую Ардуино нано? И какие концевики используются, обычные механические? Каким образом хотите менять время стоянки? Нужна-ли индикация?
Нужно нарисовать схему и написать прошивку.
Ардуино есть. Концевики механические. Компоненты маленькие нужны, ограничен в месте размещения. Думал выбрать самые маленькие концевики с лапкой.
Время стоянки хотелось бы менять в секундах прямо в скетче, этот параметр мы настрим один раз и он будет постоянным, но нужно провести эксперимент по времени уже на готовой собраной схеме. Никакие экраны и кнопки настройки не нужны. Всё должно быть самое простое.
7808543@gmail.com
Нужно нарисовать схему и написать прошивку.
Ардуино есть. Конце/// нужны. Всё должно быть самое простое.
Пишите ydom@mail.ru - сделаем. Напишу код, проверю на рабочем макете, так что вы получите на 100% проверенный рабочий код. По времени стоянки - можно временно подключить к ардуине потенциометр, выставите какое нужно время потом внесете его в программу. Пишите ydom@mail.ru Сделаю за два часа.
p.masyukov@gmail.com
Нужно нарисовать схему и написать прошивку.
Ардуино есть. Концевики механические. Компоненты маленькие нужны, ограничен в месте размещения. Думал выбрать самые маленькие концевики с лапкой.
Время стоянки хотелось бы менять в секундах прямо в скетче, этот параметр мы настрим один раз и он будет постоянным, но нужно провести эксперимент по времени уже на готовой собраной схеме. Никакие экраны и кнопки настройки не нужны. Всё должно быть самое простое.
Задача элементарная, если по колхозному (с делеями ), то рабочий скетч с комментариями - час работы. Я Вам на почту координаты сбросил Sergeev.........
Еще раз пробежался по теме, и обратил внимание на год в почте ТС. Как можно с детей брать деньги? И по причине праздника и того что на улице +15 и в фонтаны лезть не фонтан, да и стар стал уже - набросал скетчик. Правда писал в лоб и под шафе, но работать должен.
С праздником всех!
// Концевики подключены между соответствующим пином и GND. // Подтяжка пинов к питанию через резисторы 2-10 КОм (если длина проводов < 1 М можно не ставить) // Активное состояние (концевик сработал) - состояие LOW byte VERH_STOP =9; //Верхний концевик подключен к пину 9 byte NIZ_STOP =10; //Нижний концевик подключен к пину 10 // Питание на драйвер и ардуино (Vin) 7-9 В. Если питание 5В, то на ардуино подавать на +5В // Подключение драйвера MX1508. //Двигатель подключен к Motor A byte MOT_VERH =11; //Подключается к IN1 драйвера MX1508 byte MOT_NIZ =12; //Подключается к IN2 драйвера MX1508 int T_stop=3000; //Время стоянки 3000 мс (3 секунды) void setup() { Serial.begin(9600); pinMode(VERH_STOP, INPUT); //Пины концевиков устанавливаем на вход pinMode(NIZ_STOP, INPUT); digitalWrite(VERH_STOP,HIGH); //Включаем внутреннюю подтяжку пинов концевиков digitalWrite(NIZ_STOP, HIGH); pinMode(MOT_VERH, OUTPUT); //Пины управления драйвером устанавливаем на выход pinMode(MOT_NIZ, OUTPUT); //На всякий случай останавливаем мотор digitalWrite(MOT_VERH,LOW); digitalWrite(MOT_NIZ, LOW); // Прoверяем стартовую позицию if (digitalRead(VERH_STOP)==HIGH && digitalRead(NIZ_STOP)==HIGH){// Если кабинка в промежутке - едем вверх digitalWrite(MOT_NIZ, LOW); digitalWrite(MOT_VERH,HIGH); Serial.println("Start motion"); } } void loop() { // Проверяем состояние концевиков if (digitalRead(VERH_STOP)==LOW && digitalRead(NIZ_STOP)==HIGH){// Если сработал верхний концевик digitalWrite(MOT_VERH,LOW); // Стоп машина, ждем пассажиров digitalWrite(MOT_NIZ, LOW); Serial.println(" Pauza & Edem Vniz"); delay(T_stop); digitalWrite(MOT_NIZ, HIGH); digitalWrite(MOT_VERH,LOW); delay(100); // Время на съезд с концевика (должно хватить) } if (digitalRead(NIZ_STOP)==LOW && digitalRead(VERH_STOP)==HIGH){// Если сработал нижний концевик digitalWrite(MOT_VERH,LOW); // Стоп машина, ждем пассажиров digitalWrite(MOT_NIZ, LOW); Serial.println(" Pauza & Edem Vverh"); delay(T_stop); digitalWrite(MOT_NIZ, LOW); digitalWrite(MOT_VERH,HIGH); delay(100); // Время на съезд с концевика (должно хватить) } if (digitalRead(VERH_STOP)==LOW && digitalRead(NIZ_STOP)==LOW){// Если заклинил концевик или КЗ digitalWrite(MOT_VERH,LOW); // Стоп машина, проверить концевики digitalWrite(MOT_NIZ, LOW); Serial.println("Error"); } }Судя по грамотности текста сообщений ТС - он не малолетка. Для малолетки слишком грамотно пишет. :)
Судя по грамотности текста сообщений ТС - он не малолетка. Для малолетки слишком грамотно пишет. :)
Может ботаник-отличник?
Само то такая система, чтобы рыбу в садках кармить. В контейнер загружается корм. И , при движении по канату он останавливается, сбрасывает часть корма и далее...