Перемещение по заданной траектории в закрытом пространстве
- Войдите на сайт для отправки комментариев
Сб, 04/02/2017 - 23:13
Доброй ночи, уважаемые форумчане!
Необходимо реализовать перемещение по заданной траектории внутри закрытого помещения со статическими(мебель) и динамическими(люди) препятствиями. Вариант с нанесенем разметки на пол/потолок не подходит. Насколько я понял, если использовать датчики, закрепленные на стене, то там может сигнал прерываться из-за заграждения. Подскажите пожалуйста, в какую сторону смотреть, чтобы перемещенение робота было надежным(без долгих остановок из-за какой-то проблемы) и надежным(чтобы риск вывода робота из штатной работы сторонней аппаратурой был сведен к минимуму)?
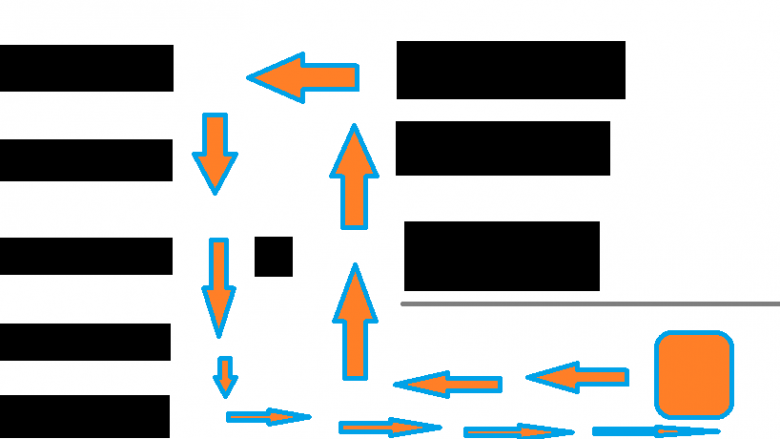
Черные блоки - статические препятствия, оранжевый - робот.
бетонные стены и никаких дуин.
Клапауций 823, забыл указать: стены кирпичные.
Клапауций 823, забыл указать: стены кирпичные.
укрепляй бетонными плитами
Клапауций 823, разве бетон не создаст лишних проблем с отражением сигнала?
Клапауций 823, разве бетон не создаст лишних проблем с отражением сигнала?
бетон создаст траекторию движения
уз датчики не подойдут?
уз датчики не подойдут?
я запретил - только хардкор, только бетон
Вспомнился анекдот
Так и с роботом . Сделать робот в виде бульдозера с заданой программой. Первый проход у него будет трудным, зато второй будет без всяких сложностей.
я за твоей мыслью не поспеваю похоже. ардуина должна влезть в евклидово пространство между исходящей уз волной или ик излучением и объектом наблюдения. допустим она это сделала? она должна изменить пространство? и как в звездный войнах должно быть? это нет то пространство что вам нужно?
https://www.youtube.com/watch?v=5bXAUqpXNAA
шаговые двигатели для ведущих колес или чего то другого? это конечно избавит от разброса параметров коллекторных моторов, но не избавит от проблемы что колеса буду находится на разной поверхности и одно из них будет скользить
положения объекта? то есть убираться нужно только вокруг статуи например? может тогда просто поставить датчик сбоку и чтобы он двигался всегда вдоль стенки. или статуя будет двигаться. я короче не совсем понял. надеюсь только я
думаю тебе стоит самому лучше представлять как это должно работать
jeka_tm, никакое пространство менять не нужно, у меня этого даже в мыслях не было. Лучше оставаться в родном Евклидовом. :)) Вопрос был в том, насколько сложно постороннему человеку изменить уз/ик сигнал так, чтобы сбить объект с верного курса?
Да, был вариант использования шаговых двигателей для ведущих колес. В интернете читал про скольжения. Видимо, действительно от них лучше отказаться. Тем более они менее экономные в плане потребления энергии.
Необходимо, чтобы объект умел передвигаться из начальной точки(оранжевый цвет на рисунке), в любую из точек a-g, из любой точки a-g в любую другую точку a-g и из любой точки a-g в начальную точку.
/// В интернете читал про скольжения.
8| А с гололедом не сталкивались по жизни, не падали?
Два вопроса имею.
1. Есть ли опыт в написании програм и особенно управляющих? Вебдизайн - пофигу.
2. Санкционирует ли Ваше руководство использование форума для консультаций по реализации наведения обекта на цель?
Правило правой(левой) руки. http://ega-math.narod.ru/Nquant/Maze.htm
ТС-у: гуглите что-то типа Лего-роботы движение в лабиринте. Соревнования по этой задаче начинаются от 9 лет.
Мне не нужны алгоритмы поиска кратчайшего пути, я обратился на форум Arduino явно не за этим. Обрабатывается информация на центральном компьютере, на нём можно чем угодно, хоть Дейкстрой воспользоваться.
В интернете описано множество различных способов ориентации объекта в закрытом пространстве. Хотелось бы узнать у людей, которые сталкивались с подобной задачей на практике, каким именно способом лучше воспользоваться? И какие возникают подводные камни при реализации?
Главный "подводный камень" или бетоная стена это когда исполнитель берется за то что ему не по силам. А вообще люди разные, ум у них разный,руки у них разные, умение у них разное. Может для вас главным препятствием окажется банальное незнание КИТАЙСКОГО ЯЗЫКА, потому что если бы вы его знали, то заказали и вам прислали. Чего тут гадать на кофейной гуще.
Вопрос был в том, насколько сложно постороннему человеку изменить уз/ик сигнал так, чтобы сбить объект с верного курса?
Можно генератором УЗ шума ввести робота в ступор.
Аналогично с ИК, если засветить датчик.
Просто заклеить датчики.
Вставать на пути робота, загоняя его куда надо.
Если надо защитится от вторжения, то сигнализацию на эти случаи надо ставить.
Twilkeris, вообще-то Лего-роботы по лабиринту занимаются не только поиском кратчайшего пути (кстати, не подскажите ли "известный алгоритм", для решения задачи "туда", а не обратно раз уж их много? А то мне - не известны) Но и решают кучу иных вопросов, в т.ч. и движения в замкнутом пространстве. Таки погуглите, прежде чем отметать с разбегу.
Ну и пока Вы не конкретизируете собственно ВАШУ задачу и её специфику, рассказать Вам что хуже или лучше .. я сильно сомневаюсь что кто-то станет вообще. Чем детальнее объяснитесь - тем точнее и скорее сможете получить помощь. В том виде, что нарисован первый пост, задач "забить датчик", "вклиниться в УЗ" .. как-бы не стоит вовсе.