Помогите новичку с первым проектом
- Войдите на сайт для отправки комментариев
Пнд, 19/10/2015 - 22:27
Всем доброго времени суток,
Прошу Вашей помощт, т.к. не могу разобраться что не так в моем первом проекте.
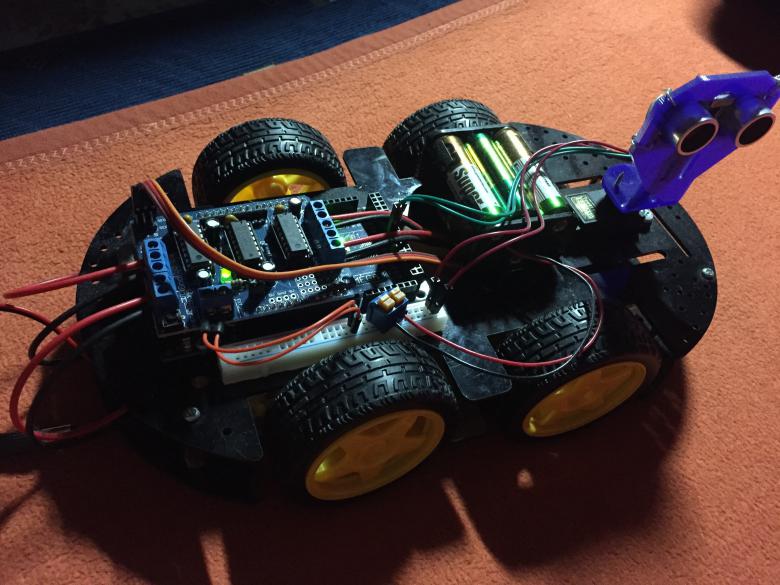
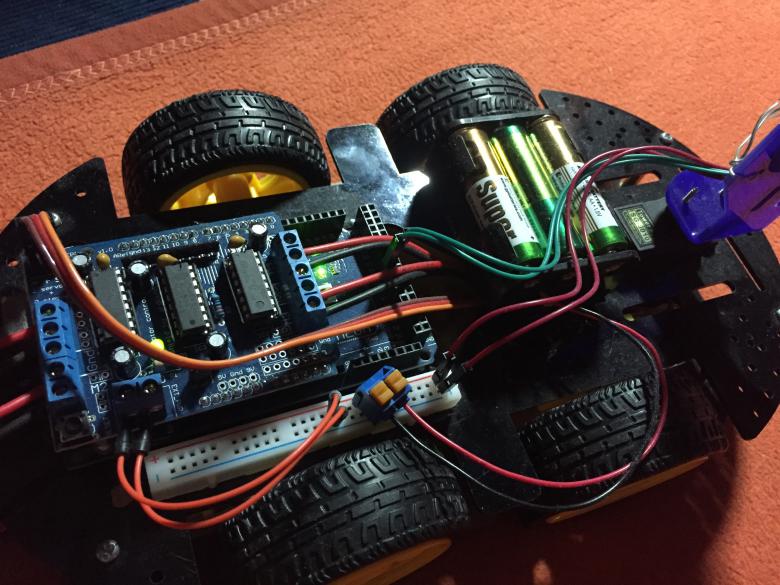
Задача, на сколько я понимаю для большинства, тривиальная. Заставить робота объезжать препятствия. Реализовать я его решил на Arduino Mega 2560, 4wd шасси, драйвер шилд, сервопривод и HC-SR04. Но робот при запуске начинает сканировать пространство в 3 положениях и далее постоянно движется назад, периодически откланяясь, останавляиваясь и далле в том же духе.
#include <AFMotor.h>
#include <Servo.h>
//Создаем объекты для двигателей
AF_DCMotor motor1(1); //канал М1 на Motor Shield — задний левый
AF_DCMotor motor2(2); //канал М2 на Motor Shield — задний правый
AF_DCMotor motor3(3); //канал М3 на Motor Shield — передний левый
AF_DCMotor motor4(4); //канал М4 на Motor Shield — передний правый
#define trigPin 35
#define echoPin 36
Servo myservo; // create servo object to control a servo
// a maximum of eight servo objects can be created
int pos = 0; // variable to store the servo position
int servoDirection = 100;
int servoDelay = 20;
void setup()
{
Serial.begin (9600);
myservo.attach(10); // attaches the servo on pin 7 to the servo object
myservo.write(0);
// Задаем направление движение
// FORWARD - вперед
// BACKWARD - назад
// RELEASE - стоп
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
}
void forward() {
motor1.run(FORWARD);
motor2.run(FORWARD);
motor3.run(FORWARD);
motor4.run(FORWARD);
}
void backward() {
motor1.run(BACKWARD);
motor2.run(BACKWARD);
motor3.run(BACKWARD);
motor4.run(BACKWARD);
}
void turnLeft() {
motor1.run(BACKWARD);
motor2.run(FORWARD);
motor3.run(BACKWARD);
motor4.run(FORWARD);
}
void turnRight() {
motor1.run(FORWARD);
motor2.run(BACKWARD);
motor3.run(FORWARD);
motor4.run(BACKWARD);
}
int CheckDistance()
{
long duration, distance;
digitalWrite(trigPin, LOW); // Added this line
delayMicroseconds(2); // Added this line
digitalWrite(trigPin, HIGH);
delayMicroseconds(10); // Added this line
digitalWrite(trigPin, LOW);
duration = pulseIn(echoPin, HIGH);
distance = (duration / 2) / 29.1;
return distance;
}
void sweepServo1() {
for (pos = 10; pos < 40; pos += 1) // goes from 0 degrees to 100 degrees
{ // in steps of 1 degree
myservo.write(pos); // tell servo to go to position in variable 'pos'
delay(10);
}
int testDistance = CheckDistance(); /// get object distance using ping
/// if object is more than 30 cm away it is out of range
if (testDistance >= 30 || testDistance <= 0) /// if object is more than 30 cm away it is out of range
{
forward();
}
else /// object is closer than 30cm, print distance
{
turnRight();
Serial.print(testDistance);
Serial.println("cm");
}
}
void sweepServo2() {
for (pos = 40; pos < 80; pos += 1) // goes from 0 degrees to 100 degrees
{ // in steps of 1 degree
myservo.write(pos); // tell servo to go to position in variable 'pos'
delay(10);
}
int testDistance = CheckDistance(); /// get object distance using ping
/// if object is more than 30 cm away it is out of range
if (testDistance >= 30 || testDistance <= 0) /// if object is more than 30 cm away it is out of range
{
forward();
}
else /// object is closer than 30cm, print distance
{
turnRight();
Serial.print(testDistance);
Serial.println("cm");
}
}
void sweepServo3() {
for (pos = 80; pos < 120; pos += 1) // goes from 0 degrees to 100 degrees
{ // in steps of 1 degree
myservo.write(pos); // tell servo to go to position in variable 'pos'
delay(10);
}
int testDistance = CheckDistance(); /// get object distance using ping
/// if object is more than 30 cm away it is out of range
if (testDistance >= 30 || testDistance <= 0) /// if object is more than 30 cm away it is out of range
{
forward();
}
else /// object is closer than 30cm, print distance
{
turnRight();
Serial.print(testDistance);
Serial.println("cm");
}
}
void loop()
{
sweepServo1();
sweepServo2();
sweepServo3();
}
 Прошу помощи, что не так в моем коде или сборке?
Прошу помощи, что не так в моем коде или сборке?
Заранее спасибо
Может движки переполюсовать?
Не помогло, уже делал.
1. Зачем нужна afmotor и как она узнает, на какие пины нужно подавать напряжение?
2. Зачем так странно крутить серву - шажками по 1 грудусу? И почему она позиционируется несиметрично?
3. Зачем при вычислении distance используется два деления подряд? Конечно, здесь это не критично, но желательно записывать формулы так, чтобы избегать наиболее длителных операций.
4. Вы трижды проделываете довольно странную операцию: сначала смотрите в одну единственную сторону, а потом сразу начинаете управлять моторами, не интересуясь, что происходит с других сторон. Причем реакция тоже весьма единообразна: если Вы (по логике) обнаруживаете препятствие справа, то все равно поворачиваете вправо. Зачем?
5. В коде у Вас вообще не предусмотрено движение назад. Никогда. А по описанию робот движется назад, чего он, судя по коду, делать вообще не может. Значит, те команды, которые Вы ему даете, он воспринимает иначе, чем Вы думаете.
Могу порекомендовать:
1. Добавить консольные команды и проверить, как реагируют двигатели на Ваши команды. Добиться, чтобы они реагировали так, как Вы хотите.
2. Добавить несколько индикаторных светодиодов, чтобы ВАы знали, о чем думает программа.
Скажу сразу, что пыьался разобраться в коде на примерах из интернета, методом тыка, т.к. вообще не знаком.
Таков и результат)
Спасибо за совет, попробую)
Пару вопросов, afmotor в данном случае не требуется?
По поводу сервы, пытался сделать что бы он на каждый градус проверял наличие препятствий. Реально получается что он поварачивается трижды на 45 и дальше просто откатывается назад. Тоже неверно?
Моторами управлять достаточно просто. По крайней мере, на том уровне, что делаете Вы. Библиотека, которой Вы пользуетесь, неизвестна. Поэтому, если Вы будете ею пользоваться, то разбираться с ней Вам придется самостоятельно. А, чувствуется, именно здесь у Вас есть проблемы.
Наличие препятствий Вы проверяете не сервой, а дальномером. У него довольно широкая диаграмма направленности - градусов 30. И довольно меджленный отклик - единицы мс. Все это делает попытки измерения расстояний с небольшим шагом по углу бессмысленными. Если бы Вы пользовались инфракрасным дальномером, ситуация была бы несколько иной.