Эластики. Ардуино на службе большой науки
- Войдите на сайт для отправки комментариев
Ср, 29/04/2020 - 12:24

Для чего я это здесь размещаю? Хрен его знает, наверное на тот случай, если кто-то из студентов, например, ищет тему для научной работы или просто найдётся энтузиаст, который захочет подумать не просто о «движении робота по линии», но и об оптимальности его манёвров. Ну, и наконец, кому-то может быть просто любопытно узнать новое, безо всяких последующих действий. В общем, если кто-то заинтересуется - буду рад, если же нет - никто (кроме моих пальцев) не пострадает.
Для начала небольшое пояснение «на пальцах».
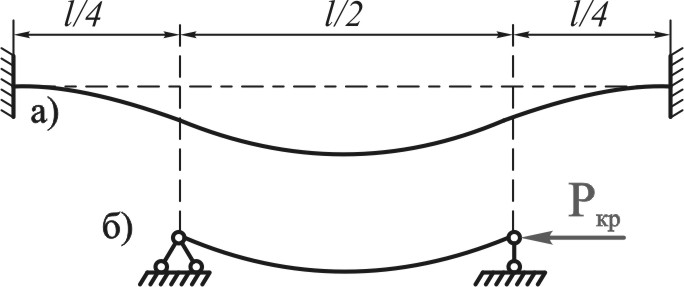
Предположим, что у Вас есть прямой упругий, гибкий стержень, концы которого закреплены на свободных шарнирах. Мы начинаем сдавливать этот стержень вдоль его оси. При некотором усилии стержень «выгнется» и будет выглядеть примерно так, как показано на рисунке (б) ниже. А если концы стержня жёстко закреплены? Он всё равно выгнется, но выглядеть будет уже так, как показано на рисунке (а).
Ну а если мы закрепим концы и начнём сдавливать не вдоль оси, а «вертеть как попало»? Изгиб стержня в этом случае может принимать самые разные формы, например:
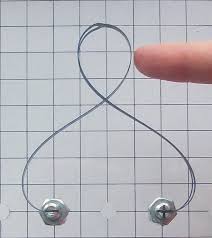
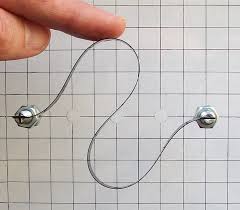
Причём формы эти устойчивы. Если приложить дополнительное усилие и деформировать стержень (палец на картинках), после того, как усилие будет снято, он восстановит свою форму. Значит есть что-то в этих кривых «оптимальное» - просто так ведь ничего не бывает, правда?
Всевозможные кривые, которые получаются при изгибу упругого гибкого стержня называются «эластиками Эйлера». Существует их полная классификация и вообще много там уже наворочено.
Оказывается, что эти самые эластики обладают целым рядом замечательных свойств. Например, это оптимальная (по затратам на маневрирование и удержание транспортного средства на траектории) траектория прохождения поворота. Если идти строго по эластике, то можно пройти поворот на максимально возможной скорости. И там много-много чего ещё (например, восстановление частично стёртых изображений и т.д.).
Более того, представьте тележку с двухколёсным прицепом, крепящемся в одной точке. Угадайте по какой кривой будут двигаться колёса прицепа при манёврах тележки? А какова оптимальная траектория прохождения поворота таким «автопоездом»? Правильно - тележка - по эластике, а прицеп - по своей эластике, через излом.
Ну, хватит, общего введения, переходим к Ардуиновским делам.
Есть знакомая команда математиков, которые исследуют эластики на предмет создания роботизированных решений для автотранспорта (в т.ч. автопоездов), стыковочных алгоритмов космических и подводных аппаратов и тому подобных задач. А для создания прототипов и экспериментов с ними они использую Ардуино (и как догадались?).
Вот полюбуйтесь на одну из их статей. Там подробно описывается маленький Ардуино-робот, который шастает вдоль эйлеровских эластик. Проблемы с роботом, которые у них возникли, всем знакомы - аж родным чем-то пахнуло.
Буду рад, если кому-то было интересно, даже не в плане самому заняться, а просто прочитать.
Интересно, а Архату это исследование помогло бы?
В списке Литературы знакомый сайт:
[10] Arduino Mega 2560, http://arduino.ru/Hardware/ArduinoBoardMega2560. ↑ 165
Ну, и на фотке робота именно Мега.
Спасибо, Евгений. Интересно. Может малого заинтересую роботами, тогда и пригодятся знания.
Спасибо, почитаем ;)
если я прявильно понял ,бегло пробежавшись по тексту статьи и первому посту ,то решается следующая задача : что бы проделать путь по опримальной траектории из точки А в точку Б , вместо того что бы использовать ,например PID регулятор для контроля за движением ,расчитывается траектория на основонии эйлеровских эластик , из которой выводится(расчитывается) функция скорости s = f(t) для конкретной траектории для каждого колеса и по ней уже робот едет ?
Пьер Безье давно это сделал.
Пьер Безье давно это сделал.
Что сделал? Решил задачу об эластиках Эйлера? Надо мужикам сказать, а то и не знают :-)