Погодозависимое управление водяным тёплым полом
- Войдите на сайт для отправки комментариев
Чт, 07/03/2019 - 09:10

Всем привет!
Построил небольшой каменный дом, отопление только водяным тёплым полом (есть только один радиатор под окнами "второго света", там потолок 4.5 метра и тёплого пола не хватает). Много бетона, наружный контур утепления, дом очень инерционный с точки зрения отопления. Делал много теплотехнических расчетов - теплорасчеты, гидравлику, экономическую целесообразность доп.утепления.
Живем в нём уже 4-ю зиму. Моё управление отоплением сводится к вращению термоголовки с выносным капиллярным датчиком на трехходовом термостатическом клапане. Ставлю по погоде и собственным ощущениям температуру подачи в тёплый пол.
Недостатки ручного управления - при резкой смене погоды дома может стать чуть жарко или чуть прохладно. Разница в 0.5°С для меня уже некомфортна. Давно хотел сделать контроллер, который учитывал бы все мои пожелания. Программирую всю жизнь, поэтому мне интересно именно сделать своё, а не купить готовое.
Дополнительным бонусом надеюсь получить небольшую экономию в оттепели. Ведь когда дома становилось жарко и чаще открывались окна (при ручном управлении) - автоматика поможет сэкономить. Чуть не забыл - источник отопления угольный котёл полуавтомат (раз в неделю загружаю до полного бункер ~200кг и свободен).
Я начал с того, что вместо жидкостной термоголовки купил электротермический сервопривод. Это такая хреновина, которая накручивается на клапан и умеет нажимать на шток клапана. Делает это она крайне неторопливо, потому что внутри нет никаких электромоторов. А есть только рабочее тело (то ли парафин, то ли толуол, хз) и нагревательная спираль. Когда я подаю на выводы сервопривода 220В, то спираль (1Вт) нагревается и постепенно нагревает рабочее тело. Через 1-2 минуты рабочее тело расширяется настолько, что давит на шток клапана. Когда я отключаю подачу электроэнергии - рабочее тело так же неторопливо возвращается в исходное состояние.
Сварганил на коленке сборку - ардуино Uno, один термодатчик ds18b20 и блок твердотельных реле (чтобы управлять подачей питания на сервопривод).
Цель № 1 - научить контроллер управлять сервоприводом и полностью заменить ручное управление "руками" на управление через инет. В результате долго мучался с управлением этим тормозным сервоприводом, но всё таки сделал приемлемый алгоритм (подробнее почитать можно в этой теме)
Цель № 1 достигнута. В облачной БД изменяю требуемую температуру подачи - и контроллер выполняет мои указания.
После этого я решил изучить влияние перемен температуры на дом и добавил еще несколько термодатчиков - четыре в доме и один на улице. Примерно неделю наблюдал за графиками температур, понял, что дом на изменения уличной температуры реагирует достаточно быстро, но очень незначительно. Например, скачок t°улицы в 10°С вызовет изменение t°дома всего на 0.5°.
На улице начало марта, поэтому отопление на минимуме. Какой-то зависимости t°дома от t°подачи воды я не нашел, очень часто меняется погода. Днем солнце, ночью подмораживает, то ветер, то штиль.
Для начала я решил сделать управление по теплопотерям дома (по уличной t°) с добавлением ПИД-регулирования по комнатной температуре.
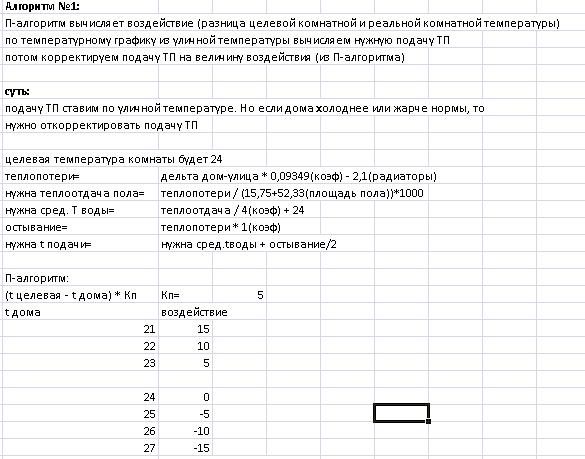
У меня есть теплорасчет - сколько теплоэнергии нужно при какой t°улицы. Есть график отопления - какую t°воды нужно подавать в пол при какой t°улицы.
Вывел коэффициенты и составил алгоритм "как из t°улицы и t°дом получить t°воды"
И к этому алгоритму добавил П-регулирование (невязка=t°целевая_дом-t°дом, Kp=5 для начала)
Что такое t° дома? Решил взять среднее арифметическое показаний с двух датчиков за последний час (чтобы всякие проветривания и прочие помехи как-то нивелировать).
Еще надоело следить за показаниями датчиков через phpMyAdmin - написал на PHP скрипт рисования графиков (очень удобная js-библиотека ChartNew).

Вот, например, сутки наблюдений.
Синий график - t°улицы (шкала температур справа)
Коричневый - t°дома.
Оранжевый - результат работы алгоритма, t°воды_желаемая.
Красный - t°воды_фактическая (мой ШИМ-алгоритм держит температуру с точностью примерно +/- 0.5°, провал на графике в 15:30 - снимал контроллер для перенастройки).
Вот еще сутки - t° дома стабильна, но так и не достигает уставки примерно на 0.5°. Пробовал увеличивать Kp до 7 - не помогает. Налицо проблема нехватки И-регулирования.

Прямо как в статье

Поэтому я решил добавить И-регулирование с Ki=0.2 (частота у меня небольшая, раз в 5 минут).
Наблюдаю уже сутки - неплохие результаты!
t°дома сразу выросла до целевой и особо не отклоняется (только вверх на 0.2°). Продолжаю наблюдать.

Спад в 22:00-23:00 это проветривание.
Посмотрим, как будет вести себя система. Конечно, сильных морозов уже не ожидается. Но скачки в 10-15° за сутки будут почти каждый день. Интересно, как поведет себя система.
Всем бобра! :)
Всем привет!
Наблюдал четыре дня. На улице постоянно скачет температура (фиолетовый график, было от -15°С до +4°С). День был очень сильный ветер - дом конкретно выстужало.
А по графику дома (черный) более менее стабильно, отклонение от -0.4° до +0.7°.
Попробую увеличить Ki до 0.5 (с ограничением -10 > istate < +10).
Наблюдал трое суток. Неплохо.
Но решил еще добавить дифф.составляющую. Kd=50
После этого 16 суток ничего не менял и не трогал. Разное было - отключение электричества, яркое солнце+оттепель (даже отопление отключал на пару суток), сильные ветры, куча народу в доме.
На улице перепады с -13°С до +10°С
Дома с +25.5° до 26.3° (заслуга солнца в южные окна). Ничего не регулирую в котельной уже месяц. Скоро уже отопление отключать.
Мой вердикт - задумка удалась! Возможно, добавил бы еще выключение циркуляционных насосов при перегреве весенним солнцем. Но это уже после проверки новым отопительным сезоном. А пока - надо придумывать для самоделки корпус, подбирать БП и красивый настенный шкаф.
+100500!
а где скетч?
// нужно ввести CRC настроек. а то каким-то образом on_delay_step стал 5 вместо 0.25 // это неправильное значение даже сохранилось в EEPROM #include <Ethernet.h> #include <OneWire.h> #include <EEPROM.h> #include <MemoryFree.h> //#include <utility/w5100.h> typedef uint8_t SensorAddress[8]; // определяем тип данных для адреса одного датчика // настройки ethernet byte mac[] = {0x1E, 0x2D, 0xBE, 0xEF, 0xFE, 0xED}; IPAddress ip(192, 168, 1, 177); IPAddress myDns(8, 8, 8, 8); IPAddress gateway(192, 168, 1, 1); IPAddress subnet(255, 255, 255, 0); char server[] = "www.zzzzzzz.ru"; EthernetClient client; #define RELAY_PIN 2 // номер выхода,подключенного к реле OneWire ds1(7); // Создаем объект OneWire для шины 1-Wire на 7-пине OneWire ds2(8); // Создаем объект OneWire для шины 1-Wire на 7-пине OneWire ds3(6); // Создаем объект OneWire для шины 1-Wire на 7-пине OneWire ds4(9); // Создаем объект OneWire для шины 1-Wire на 7-пине byte temper_data[2]; // Место для значения температуры // настройки по умолчанию ШИМ-алгоритма управления термоприводом float temp_ideal=30; // целевая температура по умолчанию float temp_gist=0.35; // гистерезис. греть/охлаждать перестаем на 0.3 градуса раньше float on_delay_default=10; // 10 секунд работаем (питание на клапан), 40 секунд отдыхаем float sum_delay=50; // общее время работы с клапаном 50 секунд. если будем дольше включать - то уменьшим время выключения float temp_delay=120; // каждые 120 секунд определяем - надо ли изменить продолжительность питания/отдыха float diff_delay=120; // динамику изменения температуры: t 2x сек назад, t 1x сек назад, t сейчас float on_delay_step=0.5; // шаг изменения ширины импульса (за раз изменяем на 1 секунду) float max_temp=50; // если температура выше критической - сбрасываем настройку $on_delay float max_on_delay=20; // не греем клапан дольше 20 сек // инициализируем переменные для работы ШИМ-алгоритма управления термоприводом float temp_now=0; // температура в этот конкретный момент float temp_old=0; // старая температура unsigned long temp_old_time=0; // момент сохранения старой температуры в temp_old float temp_before1=0; // температура temp_delay секунд назад float temp_before2=0; // температура 2 х temp_delay секунд назад float on_delay=0; // время работы с клапаном int target_direction=0; // направление к целевой температуре. +1 значит хотим повысить, -1 значит хотим понизить. 0 - ничего не хотим int alarm_frost=0; // один раз при перегреве снижаем $on_delay int hot_stopper=0; // один раз если температура резко снижается больше 1.5 градусов за 4 минуты - увеличиваем $on_delay (пытаемся замедлить снижение, чтобы клапан не закрылся целиком) int grow_chance_count=0; // счетчик шансов на рост. когда температура сама растет - просто ждем, вдруг дорастёт сама // но если 3 раза подряд роста до целевой температуры не произошло - значит нужно // усилить воздействие (ширину импульса) int freeze_counter=0; // пока идёт обратный отсчет freeze_counter (до нуля) мы не пытаемся влиять на клапан, а просто наблюдаем (кроме аварийных случаев) bool relay_status=false; String info=""; // для каждого сеанса связи с сервером собираем всякую отладочную инфу и отправляем. float temp_outdoor=0; // температура на улице float temp_home1=0; // температура дома float temp_home2=0; // температура дома float temp_home3=0; // температура дома float temp_home4=0; // температура дома long bigtimer; // таймер для контроля периодичности выполнения команд. будем раз в секунду добавлять +1. если будет расходиться с реальным временем - значит где-то зависания. int need_grow_timer=0; // таймер "сколько секунд подряд нужен рост". запускаем как только температура ниже уставки. обнуляем как дойдет до уставки или выше. // если (таймер > 10 x temp_delay && on_delay < on_delay_default) тогда on_delay = on_delay_default // для случаев когда после сильного падения on_delay (например, до нуля) замучаешься ждать роста // ведь с шагом 0.25 необходимо 12 / 0.25 * 2мин = 96 минут int FindStrInArray(char *mArray,int mlength, String marker) { int posi=-1; //Serial.println("marker:"+marker); //Serial.print("size:"); //Serial.println(marker.length()); for(int i=0;i<mlength-marker.length();i++) { int f=0; //Serial.print("pos:"); Serial.print(i); Serial.print(" symbol:"); Serial.println(mArray[i]); for(int j=0;j<marker.length()-1;j++) { if (mArray[i+j]==marker[j]) { f=1; //Serial.print("совпал символ на поз"); Serial.print(i+j); Serial.print(" маркер:"); Serial.print(marker[j]); Serial.print(" symbol:"); Serial.println(mArray[i+j]); } else { if (f==1) f=0; break; } } if (f==1) { posi=i; break; } } return(posi); } String GetStrFromArrayBetweenMarkers(char *mArray,int ArrayLength,String marker1, String marker2) { int posi1,posi2; posi1=FindStrInArray(mArray,ArrayLength,marker1); if (posi1==-1) { return("error1"); } posi2=FindStrInArray(mArray,ArrayLength,marker2); if (posi2==-1) return("error2"); String res=""; for (int i=posi1+marker1.length(); i<posi2; i++) res=res+mArray[i]; return(res); } float StringToFloat(String value) { float floatVar; char floatbufVar[32]; value.toCharArray(floatbufVar,sizeof(floatbufVar)); floatVar=atof(floatbufVar); return(floatVar); } // this method makes a HTTP connection to the server: bool httpRequest(String request,String request2,bool fOnlySend) { //client.setTimeout(2000); // close any connection before send a new request. // This will free the socket on the WiFi shield client.stop(); // if there's a successful connection: if (client.connect(server, 80)) { Serial.println("connecting..."); // send the HTTP GET request: client.print("GET /"); client.print(request); client.print(request2); client.println(" HTTP/1.1"); client.println("Host: www.zzzzzz.ru"); client.println("User-Agent: arduino-ethernet"); client.println("Connection: close"); client.println(); return(true); } else { // if you couldn't make a connection: Serial.println("connection failed"); return(false); } if (fOnlySend) client.stop(); } float HttpGet() { char mGet[200]; int mGetSize=0; int f=1; char c2=' '; bool f_start=false; //client.setTimeout(2000); long startOfHttpResponseTime = millis(); while ((long)(millis() - startOfHttpResponseTime) < 1000) { if (client.available()) { char c = client.read(); if (!f_start) { if (c2!='P'||c!='H') { c2=c; continue; } f_start=true; } Serial.print(c); mGet[mGetSize]=c; mGetSize++; if (mGetSize>sizeof(mGet)-1) break; } else break; } //client.stop(); //Serial.print("buffer size:"); //Serial.println(mGetSize); //Serial.println(mGet); if (mGetSize==0) return(-1); //Serial.println(mGetSize); // получаем настройки с сервера String res; Serial.println(temp_ideal); float last_temp_ideal=temp_ideal; res=GetStrFromArrayBetweenMarkers(mGet,mGetSize,"st1%","en1%"); if (res!="") temp_ideal=StringToFloat(res); // если на сервере изменили temp_ideal больше чем на 0.5° - то нужно срочно сбросить on_delay на default и начать реагировать if (last_temp_ideal<temp_ideal-0.5||last_temp_ideal>temp_ideal+0.5) { on_delay=on_delay_default; freeze_counter=0; } res=GetStrFromArrayBetweenMarkers(mGet,mGetSize,"st2%","en2%"); if (res!="") temp_gist=StringToFloat(res); res=GetStrFromArrayBetweenMarkers(mGet,mGetSize,"st3%","en3%"); if (res!="") sum_delay=StringToFloat(res); res=GetStrFromArrayBetweenMarkers(mGet,mGetSize,"st4%","en4%"); if (res!="") temp_delay=StringToFloat(res); res=GetStrFromArrayBetweenMarkers(mGet,mGetSize,"st5%","en5%"); if (res!="") diff_delay=StringToFloat(res); res=GetStrFromArrayBetweenMarkers(mGet,mGetSize,"st6%","en6%"); if (res!="") on_delay_step=StringToFloat(res); res=GetStrFromArrayBetweenMarkers(mGet,mGetSize,"st7%","en7%"); if (res!="") max_temp=StringToFloat(res); res=GetStrFromArrayBetweenMarkers(mGet,mGetSize,"st8%","en8%"); if (res!="") max_on_delay=StringToFloat(res); float last_on_delay_default=on_delay_default; res=GetStrFromArrayBetweenMarkers(mGet,mGetSize,"st9%","en9%"); if (res!="") on_delay_default=StringToFloat(res); // если на сервере изменили on_delay по умолчанию - то нужно обновить on_delay. вдруг удаленное управление при аварийной ситуации if (last_on_delay_default!=on_delay_default) { on_delay=on_delay_default; info=info+"def_on_delay_updated,"; } WriteParamsToEEPROM(); // полученные настройки запишем в ПЗУ Serial.println(temp_ideal); Serial.println(temp_gist); Serial.println(on_delay_step); Serial.println("загрузили настройки"); //Serial.println(res); //Serial.println(resfloat); float resfloat=1; return(resfloat); } float GetParamsFromDB() { Serial.println("подключаемся к серверу"); if (httpRequest("ard.php?action=get_params","",false)) { // успешно отправили запрос Serial.println("запрашиваем настройки"); delay(500); Serial.println(HttpGet()); Serial.println(sum_delay); } } void EEPROM_float_write(int addr, float val) // запись в ЕЕПРОМ { byte *x = (byte *)&val; for(byte i = 0; i < 4; i++) { if (EEPROM.read(i+addr)!=x[i]) EEPROM.write(i+addr, x[i]); // записываем только если изменилось - ведь ячейки ПЗУ не вечны } } float EEPROM_float_read(int addr) // чтение из ЕЕПРОМ { byte x[4]; for(byte i = 0; i < 4; i++) x[i] = EEPROM.read(i+addr); float *y = (float *)&x; return y[0]; } void ReadParamsFromEEPROM() // читаем все настройки из ПЗУ при старте { // по адресу 0 находится флаг. =1 можно читать. =255 не читать. если ПЗУ пустое (новая ардуино) то по адресу 0 будет лежать 255. if (EEPROM.read(0)!=1) return; float val; val=-1; val=EEPROM_float_read(0*4+1); if (val!=-1) { temp_ideal=val; Serial.println(val); } val=-1; val=EEPROM_float_read(1*4+1); if (val!=-1) temp_gist=val; Serial.println(val); val=-1; val=EEPROM_float_read(2*4+1); if (val!=-1) sum_delay=val; Serial.println(val); val=-1; val=EEPROM_float_read(3*4+1); if (val!=-1) temp_delay=val; Serial.println(val); val=-1; val=EEPROM_float_read(4*4+1); if (val!=-1) diff_delay=val; Serial.println(val); val=-1; val=EEPROM_float_read(5*4+1); if (val!=-1) on_delay_step=val; Serial.println(val); val=-1; val=EEPROM_float_read(6*4+1); if (val!=-1) max_temp=val; Serial.println(val); val=-1; val=EEPROM_float_read(7*4+1); if (val!=-1) max_on_delay=val; Serial.println(val); val=-1; val=EEPROM_float_read(8*4+1); if (val!=-1) on_delay_default=val; Serial.println(val); } void WriteParamsToEEPROM() // сохраняем все настройки в ПЗУ { EEPROM_float_write(0*4+1,temp_ideal); EEPROM_float_write(1*4+1,temp_gist); EEPROM_float_write(2*4+1,sum_delay); EEPROM_float_write(3*4+1,temp_delay); EEPROM_float_write(4*4+1,diff_delay); EEPROM_float_write(5*4+1,on_delay_step); EEPROM_float_write(6*4+1,max_temp); EEPROM_float_write(7*4+1,max_on_delay); EEPROM_float_write(8*4+1,on_delay_default); if (EEPROM.read(0)!=1) EEPROM.write(0, 1); // ставим флаг = 1 (можно читать настройки из EEPROM ) } void initEthernet() { Serial.println("инициализируем ethernet"); // start the Ethernet connection using a fixed IP address and DNS server: //W5100.setRetransmissionCount(2); Ethernet.begin(mac, ip, myDns,gateway,subnet); //Ethernet.begin(mac); // print the Ethernet board/shield's IP address: Serial.print("My IP address: "); Serial.println(Ethernet.localIP()); } int8_t sensorAmount(OneWire *ds) { SensorAddress sAddress; (ds)->reset_search(); int8_t sensors = 0; while ((ds)->search(sAddress)) // получили адрес датчика if ( (ds)->crc8(sAddress,7)==sAddress[7] ) { info=info+";+"; for (int i=0;i<8;i++) info=info+String(sAddress[i])+":"; info=info+";"; sensors++; } return sensors; } void setup() { bigtimer=0; pinMode(RELAY_PIN, OUTPUT); digitalWrite(RELAY_PIN, HIGH); // на всякий случай сразу выключаем реле // start serial port: Serial.begin(9600); while (!Serial) { ; // wait for serial port to connect. Needed for native USB port only } Serial.print("free memory:"); Serial.println(freeMemory()); ReadParamsFromEEPROM(); // загружаем параметры из ПЗУ (пока с инетом не соединились надо работать по старым настройкам on_delay=on_delay_default; // начинаем работать по настройкам. если в ПЗУ сбой - по настройкам из шапки программы. // при старте инициализируем ethernet и загружаем настройки с сервера delay(1000); // give the ethernet module time to boot up: initEthernet(); GetParamsFromDB(); // нужно узнать адреса всех подключенных датчиков info=""; // переменные датчика температуры { SensorAddress sAddress; int8_t sensors = 0; //OneWire ds1(7); // Создаем объект OneWire для шины 1-Wire на 7-пине //OneWire ds2(8); // Создаем объект OneWire для шины 1-Wire на 8-пине //OneWire ds3(6); // Создаем объект OneWire для шины 1-Wire на 6-пине ds1.reset_search(); while (ds1.search(sAddress)) // получили адрес датчика if ( ds1.crc8(sAddress,7)==sAddress[7] ) { info=info+";+"; for (int i=0;i<8;i++) info=info+String(sAddress[i])+":"; info=info+";"; sensors++; } info=info+"Wire1count:"+String(sensors); httpRequest("ard.php?sensor_count=-1&sensor_num=3&sensor_3=2&info=",info , true); info=""; delay(2000); ds2.reset_search(); sensors = 0; while (ds2.search(sAddress)) // получили адрес датчика if ( ds2.crc8(sAddress,7)==sAddress[7] ) { info=info+";+"; for (int i=0;i<8;i++) info=info+String(sAddress[i])+":"; info=info+";"; sensors++; } info=info+"Wire2count:"+String(sensors); httpRequest("ard.php?sensor_count=-1&sensor_num=3&sensor_3=2&info=",info , true); info=""; delay(2000); ds3.reset_search(); sensors = 0; while (ds3.search(sAddress)) // получили адрес датчика if ( ds3.crc8(sAddress,7)==sAddress[7] ) { info=info+";+"; for (int i=0;i<8;i++) info=info+String(sAddress[i])+":"; info=info+";"; sensors++; } info=info+"Wire3count:"+String(sensors); httpRequest("ard.php?sensor_count=-1&sensor_num=3&sensor_3=2&info=",info , true ); info=""; delay(2000); ds4.reset_search(); sensors = 0; while (ds4.search(sAddress)) // получили адрес датчика if ( ds4.crc8(sAddress,7)==sAddress[7] ) { info=info+";+"; for (int i=0;i<8;i++) info=info+String(sAddress[i])+":"; info=info+";"; sensors++; } info=info+"Wire4count:"+String(sensors); httpRequest("ard.php?sensor_count=-1&sensor_num=3&sensor_3=2&info=",info , true ); delay(2000); // проверяем, сколько символов помещается в буфер GET-запроса //delay(2000); //httpRequest("ard.php?sensor_count=-1&sensor_num=3&sensor_3=",String(freeMemory()), true); //delay(2000); //httpRequest("ard.php?sensor_count=-1&sensor_num=3&sensor_3=33&info=A","", true); //delay(2000); //httpRequest("ard.php?sensor_count=-1&sensor_num=3&sensor_3=34","&info=A", true); //delay(2000); info=""; delay(2000); // info=""; // int SensorCount=sensorAmount(&ds1); Serial.print("Wire1 - total devices found: "+String(SensorCount)); info=info+"Wire1count:"+String(SensorCount); // httpRequest("ard.php?sensor_count=-1&sensor_num=3&sensor_3=2&info=",info , true); // info=""; // delay(2000); // SensorCount=sensorAmount(&ds2); Serial.print("Wire2 - total devices found: "+String(SensorCount)); info=info+"Wire2count:"+String(SensorCount); // httpRequest("ard.php?sensor_count=-1&sensor_num=3&sensor_3=2&info=",info , true); // info=""; // delay(2000); // SensorCount=sensorAmount(&ds3); Serial.print("Wire3 - total devices found: "+String(SensorCount)); info=info+"Wire3count:"+String(SensorCount); // httpRequest("ard.php?sensor_count=-1&sensor_num=3&sensor_3=2&info=",info , true); // info=""; // delay(2000); Serial.print("free memory:"); Serial.println(freeMemory()); } } void loop() { // 1 - даём импульсы ШИМ на термопривод (реле через пин7) perSHIM(on_delay*1000,sum_delay*1000-on_delay*1000); // 2 - каждые X секунды измеряем температуру perReadTemperature(3000); // 3 - каждые X секунд отправляем температуру на сервер (для анализа лога) perSendTemp(30000); // 4 - каждые 5 минут переинициализируем ethernet (вдруг обрыв или глюки) и загружаем настройки с сервера (вдруг изменились?) perInitEthernet(300000); // 5 - каждую секунду вызываем функцию анализа и принятия решения perAnalyze(1000); //Serial.print("free memory:"); Serial.println(freeMemory()); } void perSHIM(unsigned long interval_on,unsigned long interval_off){ static unsigned long prevTime = 0; // время когда последний раз переключали реле unsigned long interval; if (relay_status) interval=interval_off; // реле включено, значит отсчитываем миллисекунды до выключения реле else interval=interval_on; // реле выключено, значит отсчитываем миллисекунды до включения реле if(millis() - prevTime > interval ) { Serial.println("--"); prevTime = millis(); // if (relay_status) { Serial.println("off"); //digitalWrite(LED_BUILTIN,HIGH); digitalWrite(RELAY_PIN,LOW); } else { Serial.println("on"); //digitalWrite(LED_BUILTIN,LOW); digitalWrite(RELAY_PIN,HIGH); } relay_status=!relay_status; } } void perReadTemperature(unsigned long interval){ static unsigned long prevTime = 0; // время когда последний раз читали температуру if(millis() - prevTime > interval ) { prevTime = millis(); // float temperature; int LowByte,HighByte,TReading,SignBit; ds1.reset(); // Теперь готовимся получить значение измеренной температуры ds1.write(0xCC); ds1.write(0xBE); // Просим передать нам значение регистров со значением температуры // Получаем и считываем ответ temper_data[0]=ds1.read(); temper_data[1]=ds1.read(); //temperature = ((temper_data[1] << 8) | temper_data[0]) * 0.0625; LowByte = temper_data[0]; HighByte = temper_data[1]; TReading = (HighByte << 8) | LowByte; SignBit = TReading & 0x8000; // проверяем значение в самом старшем бите if (SignBit) // если значение отрицательное { TReading = (TReading ^ 0xffff) + 1; } temperature=float(TReading)*0.0625; // умножаем на (100 * 0.0625) или 6.25 if (SignBit) // если значение отрицательное temperature=-temperature; //temperature=5; //LowByte = temper_data[0]; //HighByte = temper_data[1]; //temperature = ((temper_data[1] << 8) | temper_data[0]) * 0.0625; //TReading = (temper_data[1] << 8) + temper_data[0]; // склеиваем //SignBit = TReading & 0x8000; // test most sig bit //if (SignBit) // negative // TReading = (TReading ^ 0xffff) + 1; // 2 comp //temperature = TReading * 0.0625; // multiply by (100 * 0.0625) or 6.25 //if (SignBit) temperature=-temperature; // Формируем итоговое значение: // - сперва "склеиваем" значение, // - затем умножаем его на коэффициент, соответсвующий разрешающей способности (для 12 бит по умолчанию - это 0,0625) //float temperature = ((temper_data[1] << 8) | temper_data[0]) * 0.0625; // Выводим полученное значение температуры в монитор порта //Serial.println("подача ТП:"+String(temperature)); temp_now=temperature; ds2.reset(); // Теперь готовимся получить значение измеренной температуры ds2.write(0xCC); ds2.write(0xBE); // Просим передать нам значение регистров со значением температуры temper_data[0]=ds2.read(); temper_data[1]=ds2.read(); LowByte = temper_data[0]; HighByte = temper_data[1]; TReading = (HighByte << 8) | LowByte; SignBit = TReading & 0x8000; // проверяем значение в самом старшем бите if (SignBit) // если значение отрицательное { TReading = (TReading ^ 0xffff) + 1; } temperature=float(TReading)*0.0625; // умножаем на (100 * 0.0625) или 6.25 if (SignBit) // если значение отрицательное temperature=temperature*-1; //temperature=5; temp_outdoor=temperature; //; 40:255:64:139:33:23:4:48:;; 40:255:198:229:33:23:4:226:;; 40:255:153:141:33:23:3:23:;Wire3count:3 SensorAddress sAddress; sAddress[0]=40; sAddress[1]=255; sAddress[2]=64; sAddress[3]=139; sAddress[4]=33; sAddress[5]=23; sAddress[6]=4; sAddress[7]=48; ds3.reset(); // Теперь готовимся получить значение измеренной температуры ds3.select(sAddress); ds3.write(0xBE); // Просим передать нам значение регистров со значением температуры temper_data[0]=ds3.read(); temper_data[1]=ds3.read(); LowByte = temper_data[0]; HighByte = temper_data[1]; TReading = (HighByte << 8) | LowByte; SignBit = TReading & 0x8000; // проверяем значение в самом старшем бите if (SignBit) TReading = (TReading ^ 0xffff) + 1; // если значение отрицательное temperature=float(TReading)*0.0625; // умножаем на (100 * 0.0625) или 6.25 if (SignBit) temperature=-temperature; // если значение отрицательное temp_home1=temperature; sAddress[0]=40; sAddress[1]=255; sAddress[2]=198; sAddress[3]=229; sAddress[4]=33; sAddress[5]=23; sAddress[6]=4; sAddress[7]=226; ds3.reset(); // Теперь готовимся получить значение измеренной температуры ds3.select(sAddress); ds3.write(0xBE); // Просим передать нам значение регистров со значением температуры temper_data[0]=ds3.read(); temper_data[1]=ds3.read(); LowByte = temper_data[0]; HighByte = temper_data[1]; TReading = (HighByte << 8) | LowByte; SignBit = TReading & 0x8000; // проверяем значение в самом старшем бите if (SignBit) TReading = (TReading ^ 0xffff) + 1; // если значение отрицательное temperature=float(TReading)*0.0625; // умножаем на (100 * 0.0625) или 6.25 if (SignBit) temperature=-temperature; // если значение отрицательное temp_home2=temperature; sAddress[0]=40; sAddress[1]=255; sAddress[2]=153; sAddress[3]=141; sAddress[4]=33; sAddress[5]=23; sAddress[6]=3; sAddress[7]=23; ds3.reset(); // Теперь готовимся получить значение измеренной температуры ds3.select(sAddress); ds3.write(0xBE); // Просим передать нам значение регистров со значением температуры temper_data[0]=ds3.read(); temper_data[1]=ds3.read(); LowByte = temper_data[0]; HighByte = temper_data[1]; TReading = (HighByte << 8) | LowByte; SignBit = TReading & 0x8000; // проверяем значение в самом старшем бите if (SignBit) TReading = (TReading ^ 0xffff) + 1; // если значение отрицательное temperature=float(TReading)*0.0625; // умножаем на (100 * 0.0625) или 6.25 if (SignBit) temperature=-temperature; // если значение отрицательное temp_home3=temperature; ds4.reset(); // Теперь готовимся получить значение измеренной температуры ds4.write(0xCC); ds4.write(0xBE); // Просим передать нам значение регистров со значением температуры temper_data[0]=ds4.read(); temper_data[1]=ds4.read(); LowByte = temper_data[0]; HighByte = temper_data[1]; TReading = (HighByte << 8) | LowByte; SignBit = TReading & 0x8000; // проверяем значение в самом старшем бите if (SignBit) TReading = (TReading ^ 0xffff) + 1; // если значение отрицательное temperature=float(TReading)*0.0625; // умножаем на (100 * 0.0625) или 6.25 if (SignBit) temperature=-temperature; // если значение отрицательное temp_home4=temperature; ds1.reset(); // Теперь готовимся получить значение измеренной температуры ds1.write(0xCC); // Даем датчику DS18b20 команду пропустить поиск по адресу. В нашем случае только одно устрйоство ds1.write(0x44); // Даем датчику DS18b20 команду измерить температуру. Само значение температуры мы еще не получаем - датчик его положит во внутреннюю память ds2.reset(); // Теперь готовимся получить значение измеренной температуры ds2.write(0xCC); // Даем датчику DS18b20 команду пропустить поиск по адресу. В нашем случае только одно устрйоство ds2.write(0x44); // Даем датчику DS18b20 команду измерить температуру. Само значение температуры мы еще не получаем - датчик его положит во внутреннюю память ds3.reset(); // Теперь готовимся получить значение измеренной температуры ds3.write(0xCC); // Даем датчику DS18b20 команду пропустить поиск по адресу. Пусть все датчики измеряют ds3.write(0x44); // Даем датчику DS18b20 команду измерить температуру. Само значение температуры мы еще не получаем - датчик его положит во внутреннюю память ds4.reset(); // Теперь готовимся получить значение измеренной температуры ds4.write(0xCC); // Даем датчику DS18b20 команду пропустить поиск по адресу. Пусть все датчики измеряют ds4.write(0x44); // Даем датчику DS18b20 команду измерить температуру. Само значение температуры мы еще не получаем - датчик его положит во внутреннюю память // Микросхема измеряет температуру, а мы пока занимаемся другими делами } } void perSendTemp(unsigned long interval){ static unsigned long prevTime = 0; // время когда последний раз if(millis() - prevTime > interval ) { prevTime = millis(); // Serial.println("подключаемся к серверу"); client.stop(); // if there's a successful connection: if (client.connect(server, 80)) { Serial.println("connecting..."); // send the HTTP GET request: client.print("GET /"); client.print("ard.php?sensor_count=7"); client.print("&sensor_1="); client.print(temp_now); client.print("&sensor_2="); client.print(on_delay); client.print("&sensor_3="); client.print(temp_outdoor); client.print("&sensor_4="); client.print(temp_home1); client.print("&sensor_5="); client.print(temp_home2); client.print("&sensor_6="); client.print(temp_home3); client.print("&sensor_7="); client.print(temp_home4); client.print("&info="); client.print(info); client.println(" HTTP/1.1"); client.println("Host: www.zzzzzzz.ru"); client.println("User-Agent: arduino-ethernet"); client.println("Connection: close"); client.println(); } else { // if you couldn't make a connection: Serial.println("connection failed"); } info=""; } } void perInitEthernet(unsigned long interval){ static unsigned long prevTime = 0; // время когда последний раз if(millis() - prevTime > interval ) { prevTime = millis(); // initEthernet(); GetParamsFromDB(); } } void perAnalyze(unsigned long interval){ static unsigned long prevTime = 0; // время когда последний раз if(millis() - prevTime > interval ) { prevTime = millis(); // ///////////////////////////////////////////////////////////////// // обрабатываем ///////////////////////////////////////////////////////////////// bigtimer++; if (temp_old_time==0) { temp_old=temp_now; // через temp_delay секунд эта температура станет полезна temp_old_time=millis(); } else if (millis()-temp_old_time>diff_delay*1000) { // этот момент настал temp_before2=temp_before1; temp_before1=temp_old; temp_old_time=0; } // управляем воздействием в зависимости от текущей температуры if (freeze_counter>0) { // между точками воздействия реагируем на аварийные ситуации freeze_counter--; // вдруг мы пытаемся нагревать, а температура превысила уставку? // нужно срочно остудить на одну ступень, а не ждать кучу времени ($freeze_counter) пока перегреется // но только один раз if (temp_now>temp_ideal+temp_gist && target_direction==1 && alarm_frost==0) { target_direction=-1; grow_chance_count=0; // обнуляем счетчик шансов на прогрев (перегрелись, куда еще :) alarm_frost++; on_delay=on_delay-on_delay_step; } if (hot_stopper<1 && temp_before2>temp_before1 && temp_before1>temp_now && temp_before2-temp_now>1.5) { // резкое падение нужно один раз замедлить on_delay=on_delay+on_delay_step; hot_stopper++; } } else { // противоаварийный сброс настроек, если температура выше критической 4 минуты подряд if (temp_now>max_temp && temp_before1>max_temp && temp_before2>max_temp) { on_delay=on_delay_default; } // если температура выше критической и on_delay на максимуме - сбрасываем настройки, что-то резко изменилось if (temp_now>max_temp && on_delay>=(max_on_delay-on_delay_step)) { on_delay=on_delay_default; } // а если температура = установке $temp_ideal, тогда вообще ничего делать не нужно // тогда остановим $freeze_counter, пока температура не выйдет за пределы if (temp_now<(temp_ideal-temp_gist)) { // если температура ниже заданной need_grow_timer++; // таймер "сколько секунд подряд нужен рост". запускаем как только температура ниже уставки. обнуляем как дойдет до уставки или выше. // если (таймер > 10 x temp_delay && on_delay < on_delay_default) тогда on_delay = on_delay_default // для случаев когда после сильного падения on_delay (например, до нуля) замучаешься ждать роста // ведь с шагом 0.25 необходимо 12 / 0.25 * 2мин = 96 минут if (need_grow_timer > 10*temp_delay && on_delay < on_delay_default) on_delay=on_delay_default; // нужно сильнее открывать клапан (увеличить on_delay) hot_stopper=0; // обнуляем счетчик попыток замедлить падение температуры target_direction=1; // минуточку, может быть температура уже растёт? зачем еще сильнее открывать клапан? if (temp_before2<temp_before1 && temp_before1<temp_now ) { if (grow_chance_count<4) grow_chance_count++; // температура и так растет. даём шанс else if (temp_now-temp_before2>=1.5) // шансы на рост уже исчерпаны. но вдруг температура уже растёт хорошими темпами? ; // растёт хорошо! 1.5 градуса за 4 минуты, будем ждать сколько потребуется! else // рост слишком медленный, увеличиваем ширину импульса на термопривод on_delay=on_delay+on_delay_step; } else { on_delay=on_delay+on_delay_step; // если до уставки осталось более 3 градусов - ускоряем разогрев (увеличим on_delay еще на ступень on_delay_step) if ( (temp_ideal-temp_gist)-temp_now > 3 ) on_delay=on_delay+on_delay_step; } if (on_delay>max_on_delay) on_delay=max_on_delay; // не позволяем подавать питания на термопривод импульсами дольше чем max_on_delay freeze_counter=temp_delay*2; // термопривод долго реагирует, не торопимся } else if (temp_now>(temp_ideal+temp_gist)) { // нужно слабее открывать клапан (увеличить on_delay) target_direction=-1; need_grow_timer=0; // таймер "сколько секунд подряд нужен рост". запускаем как только температура ниже уставки. обнуляем как дойдет до уставки или выше. alarm_frost=0; // обнуляем счетчик аварийных охлаждений grow_chance_count=0; // обнуляем счетчик шансов на прогрев (перегрелись, куда еще :) // минуточку, может быть температура уже падает? зачем еще сильнее прикрывать клапан? if (temp_before2>temp_before1 && temp_before1>temp_now) // уже падает { // если падает и мы недалеко от целевой температуры - лучше немного подождать, чем вызвать резкое неконтролируемое падение if ( (temp_now-(temp_ideal+temp_gist))<4 ) { on_delay=on_delay; } // просто ждём // хотя температура и падает, но у нас сильный перегрев (на 10 градусов) - нужно прикрыть клапан if ( (temp_before2-(temp_ideal+temp_gist))>10&& (temp_before1-(temp_ideal+temp_gist))>10&& (temp_now-(temp_ideal+temp_gist))>10 ) { // горячее на 10 градусов уже 4 минуты // нужно дважды уменьшить ширину импульса if (on_delay<on_delay_step*3) on_delay=on_delay_step; else { on_delay=on_delay-2*on_delay_step; } } } else // температура не падает, уменьшаем ширину импульса на термопривод if (on_delay<on_delay_step*2) on_delay=on_delay_step; else { on_delay=on_delay-on_delay_step; } freeze_counter=temp_delay; } else { // температура в пределах гистерезиса target_direction=0; // никуда не дергаемся, тепло, хорошо :) need_grow_timer=0; // таймер "сколько секунд подряд нужен рост". запускаем как только температура ниже уставки. обнуляем как дойдет до уставки или выше. alarm_frost=0; // обнуляем счетчик аварийных охлаждений grow_chance_count=0; // обнуляем счетчик шансов на прогрев (вышли на режим, всё норм) hot_stopper=0; // обнуляем счетчик попыток замедлить падение температуры } } ///////////////////////////////////////////////////////////////// ///////////////////////////////////////////////////////////////// ///////////////////////////////////////////////////////////////// } }Спасибо.
Алгоритм в чём состоит?
Нет формулы - значит нет понимания присходящих процессов.
с проветриванием интересно.
--------------------------------------------------------------------------
Имею дровяной котёл.
В уме высчитываю необходимую температуру теплоносителя.
Рассчитал теплоёмкость дома, теплопотери в зависимости от температуры на улице, потери тепла через каждую стену(сравнил с фактической - сошлось), градиент температуры в комнате ( измерил),.....
-------------------------------------------------------------------------
Теплотехники всех стран объединяйтесь!
-------------------------------------------------------------------------
вот мой проект по отоплению ( солнцем ):
http://arduino.ru/forum/proekty/kontroller-otopleniya-ot-solnechnogo-kollektora