RoboTumbler - робот который сам встает после падения
- Войдите на сайт для отправки комментариев
Пнд, 23/12/2013 - 09:04

RoboTumbler - это робот неваляшка. Название робота характеризует его основную функцию. В переводе с английского, Tumbler означает «неваляшка, акробат». Основная задача этого робота, оставаться в горизонтальном положении. Он может самостоятельно встать после падения.
Полгода назад я увлекся робототехникой, до этого момента c электроникой меня ничего не связывало. Впечатленный разнообразием роботов обладающих потрясающими способностями, мне захотелось сделать своего. Смотря ролик про робота NAO, я увидел, как он встает после падения. Не зная как это работает, я решил, что должен сделать, что то подобное. Прошло немного времени, я познакомился с Arduino и понял, что это совсем не сложно. Решил начинать постепенно, чтобы понять все тонкости. И вот сейчас, хочу показать вам робота RoboTumbler, который может автоматически вставать после падения.
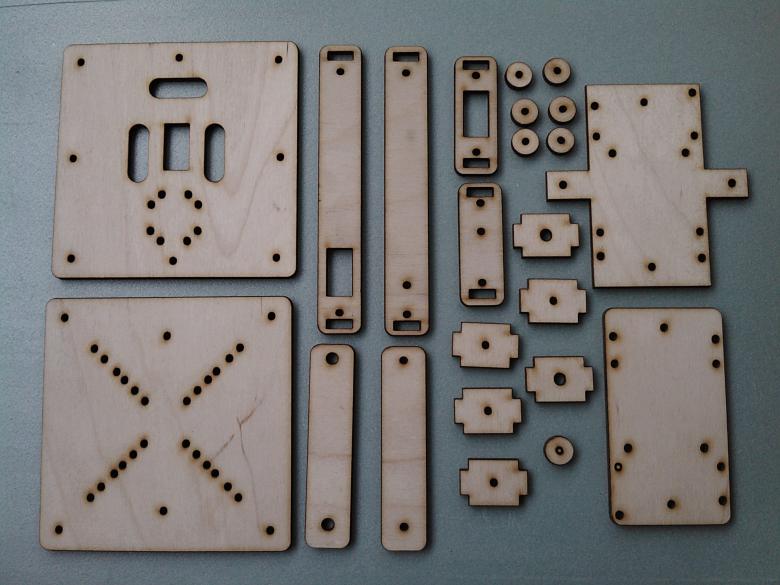
Фото:


Видео:
http://www.youtube.com/watch?v=nwfyMfaeQsg
Информация:
Автор: Сергей Зайцев (ZSeregaA)
Страничка проекта: RoboTumbler на RoboController.ru
прикольный. научи его еще ползти как червяк в мультиках
прикольный. научи его еще ползти как червяк в мультиках
Я бы с радостью, но сервы слабые. Возможно в новой, более сильной версии.
Выкладываю файлы проекта RoboTumbler. Используя эти файлы, вы сможете сделать такого робота сами.
RoboTumbler_v01_ino.zip - архив с файлом кода для Arduino. Код основан на готовом коде для 6DOF. Состоит из нескольких файлов, запускать RoboTumbler_v01.
RoboTumbler_v16_cdr.zip - архив с файлом чертежей для CorelDraw x6. Сохранено для версии 16.0. В чертежах учтены допуски в 0,2 мм. (толщина реза лазера). Например, отверстие 3 мм, на чертеже будет 2,8 мм.