Фильтрация цифрового энкодера
- Войдите на сайт для отправки комментариев
Чт, 12/10/2017 - 13:47
Помогите пожалуйста отфильтровать показания энкодера.
Суть проблемы в том, что сделал ПИД регулятор для колеса машинки, но из-за большого шума колесо на малых оборотах сильно дергается.
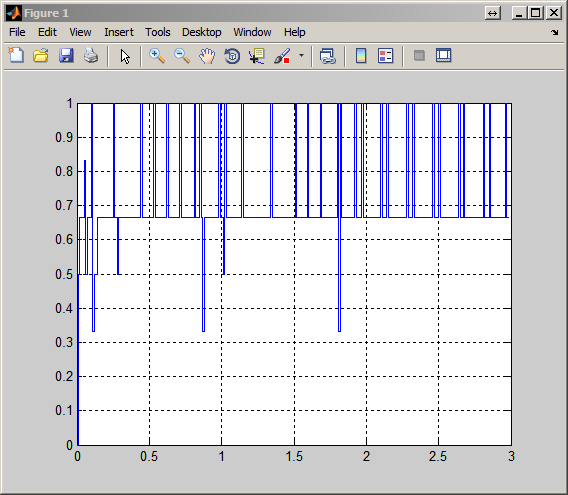
вот такие скачки у энкодера при равномерном вращении колеса
и собственно код программы
#include <PID_v1.h>
#include <Wire.h>
#define encoderPin 2
byte acc = 0;
byte ADDRESS = 0;
volatile double numberOfImpulses = 0;
double Setpoint, Input, Output, X;
PID myPID(&Input, &Output, &Setpoint, 20.75, 50.4, 0.09935, DIRECT);
int IN3 = 5; // Input3 подключен к выводу 5
int IN4 = 4; // Input4 подключен к выводу 4
int ENB = 11; // ENB подключен к выводу 3 (PWM)
union ReceiveSpeed{ //Принимаемая скорость от ведущего
short SpeedSh;
char SpeedCh[2];
}Speed;
void interrupt0(){ // Функция прерывания на втором пине (D2)
numberOfImpulses++;
return;
}
void setup(){ // Функция инициализации
Serial.begin (57600);
//ENCODER
pinMode (encoderPin, INPUT);
attachInterrupt(0, interrupt0, RISING); //Encoder pin on interrupt 0 (pin D2)
//MOTORSHIELD
pinMode (ENB, OUTPUT);
pinMode (IN3, OUTPUT);
pinMode (IN4, OUTPUT);
Setpoint=17; // заданная скорость
myPID.SetSampleTime(100); //dt для ПИД-регулятора
myPID.SetOutputLimits(0, 255); //допустимые границы управления ПИД-регулятора
myPID.SetMode(AUTOMATIC); //включаем ПИД-регулятор
interrupts();
}
void loop(){ // Основной цикл программы
Input = numberOfImpulses;
if (myPID.Compute()){
analogWrite(ENB, Output);
digitalWrite (IN3, HIGH);
digitalWrite (IN4, LOW);
/* Serial.print("numberOfImpulses=");
Serial.print(numberOfImpulses);
Serial.print(" ");
Serial.print("Setpoint=");
Serial.print(Setpoint);
Serial.print(" ");
Serial.print("Output=");
Serial.print(Output);
Serial.print(" ");
Serial.print("Input=");
Serial.println(Input);
*/ для наблюдения за показаниями через монитор порта
numberOfImpulses = 0;
}
}
Можно использовать фильтр Калмана, примеры тут и тут.
Спасибо, сделал по другому, использовал экспоненциальное сглаживание
ct=numberOfImpulses; x=st1+a*(ct-st1); st=x; st1=stx; stx=st; Input = st;