Контроллер испортил значение переменной.
- Войдите на сайт для отправки комментариев
Вс, 19/06/2022 - 00:49
Добрый день.
В процессе работы скетча контроллер сам поменял значение переменной на какой то левое
и продолжил работать.
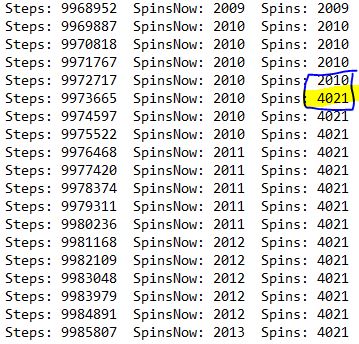
В логе видно как идут шаги двигателя и текущие обороты, как набирается новый оборот, происходит событие.
Ни с чего сохраненное значение оборотов меняется с 2010 на 4021.
Что делать? Кто еще мог поменять значение переменной?
Часть кода, где связаны все трое и единственное место, где меняется Spins
unsigned int Spins = 0; //обороты
unsigned int SpinsNow = 0; //обороты
const float PeredatochnoeChislo = 3.1; //передаточное число между шестернями привода
....
noInterrupts();
....
SpinsNow = Steps/1600/PeredatochnoeChislo;
if (SpinsNow>Spins) { // каждый оборот
Spins = SpinsNow;
....
}
interrupts();
ошибку ищи, контроллер
для начала сделать переменную волатильной
Добрый день.
...единственное место, где меняется Spins
Для того, чтобы быть уверенным, что это действительно единственное место, нужно проанализировать в программе кроме приведенного фрагмента еще все места, где осуществляется работа с массивами либо указателями.
В коде есть пид регулятор, который использует указатели:
И два массива:
long LeftSide[11]; long RightSide[11]; unsigned int modbus_array[2] = {0, 1};Они как то могут "портить" мою переменную?
Так эта переменная не участвует в прерывании.
Так можно вообще все переменные объявить как volatile
весь код выкладывайте, по кускам на этом форуме никто гадать не будет
Так эта переменная не участвует в прерывании.
Так можно вообще все переменные объявить как volatile
вы точно уверены что компилятор загнал ее в ОЗУ, а не в регистр?
весь код выкладывайте, по кускам на этом форуме никто гадать не будет
#define MainStEnb 10 //Основной ШД #define MainStDir 9 #define MainStStep 8 #define MoveStEnb 13 //Укладчик ШД #define MoveStDir 12 #define MoveStStep 11 #define ledPin 3 #define ledRXTXPin 2 #define AnalogSignal A1// датчик провисания(угол) #define ButtonPin A0 //кнопка "Домой" #define LeftStop A2 // концевой выключатель для калибровки ноля #include <ModbusRtu.h> #include <PID_v1.h> #include <GyverTimers.h> const int KP = 26; // коэффициент пропорциональности ПИД, иногда меняется от глубины намотки текущей катушки double Setpoint, Input, Output; PID regulator(&Input, &Output, &Setpoint, KP, 1, 0, REVERSE); unsigned int StepsForMM = 200, RollWidth = 50; // ширина наматываемой части unsigned int ShiftWidthLeft = 2; //отступ слева от концевого выключателя const float RollSide = 12.5; //суммарная толщина бортиков катушек const float PeredatochnoeChislo = 3.1; //передаточное число между шестернями привода unsigned int FilamentWidth = 3; // ширина занимаемая одним витком 3 на первом ряду затем 2 const unsigned int MainSpeedMax = 4200; // макс скорость const unsigned int MainSpeedMin = 0; //минимальная скокрость работы - 0 - стоп const int PIDInterval = 100; //интервал обработки датчика провисания в мс bool s1 = 0; bool s2 = 0; volatile unsigned long Steps = 0; //шаги онсновного привода const int AngleConst = 245; //угол в аналогрид(0-1023) нечто среднее между 210(верх) и 300 (нижнее положение ролика) unsigned int RollNum = 1; //номер катушки unsigned int Speed = 2000; //частота таймера осн двиг unsigned int MoveStSpeed = 600; //частота(скорость) частота вращения мотора укладчика unsigned int SpinsNow = 0; //обороты unsigned int Spins = 0; //обороты int Row = 0; // ряд volatile long MoveStCurrentPosition = 0; //текущая координата volatile long MoveStTarget = 0; // цель для ползуна long LeftSide[11]; long RightSide[11]; bool isEnabe = 0; // выключатель bool Direction = 1; // направление хода укладчика один это двигаться направо bool NowGoingHome = 0; //сейчас еду домой bool OutOfRoll = 0; // укладчик находится вне диапазона намотки, нужно для увеличения скокрости укладчика относительно намотки int AvgAnalogRead = 0; //средние значения с датчика unsigned long LEDTimer, AnalogReadTimer, MainStSpeedUpdateTimer, isEnableTimer = 0; //таймеры bool ledState = 0; unsigned int modbus_array[2] = {0, 1}; //Готовим массив данных "разрешно работать 0/1" и "номер катушки" Modbus bus(4, Serial, 4); // this is slave 4, Serial 0, and RS-485 (4 pin for enable) void setup() { pinMode(MainStEnb, OUTPUT); // Инициализация осноного мотора pinMode(MainStDir, OUTPUT); pinMode(MainStStep, OUTPUT); pinMode(MoveStEnb, OUTPUT); // Инициализация мотора укладчика pinMode(MoveStDir, OUTPUT); pinMode(MoveStStep, OUTPUT); pinMode(ledPin, OUTPUT); pinMode(ledRXTXPin, OUTPUT); pinMode(LeftStop, INPUT); //концевик слева digitalWrite(LeftStop, HIGH); pinMode(ButtonPin, INPUT); //кнопка Домой digitalWrite(ButtonPin, HIGH); // Инициализация и параметры ПИД Setpoint = AngleConst; regulator.SetMode(AUTOMATIC); regulator.SetOutputLimits(MainSpeedMin, MainSpeedMax); regulator.SetSampleTime(PIDInterval); Serial.begin(19200); bus.start(); Serial.println("Start"); for (int i = 1; i <= 10; i++) { //расчитываем параметры катушек LeftSide[i] = ((i - 1) * StepsForMM * (RollWidth + RollSide) + StepsForMM * ShiftWidthLeft); RightSide[i] = LeftSide[i] + StepsForMM * RollWidth; Serial.print("i: "); Serial.print(i); Serial.print(" "); Serial.print(LeftSide[i]); Serial.print("<< >>"); Serial.println(RightSide[i]); } Timer1.setFrequency(Speed); //частота таймера Timer1.enableISR(CHANNEL_B); // Подключить прерывание таймера 1, канал B Timer2.setFrequency(MoveStSpeed); //частота таймера Timer2.enableISR(CHANNEL_B); // Подключить прерывание таймера 2, канал B //при генерации меандра реальная частота будет в два раза меньше заданной из-за особенности работы самого таймера. } ISR(TIMER1_B) { //прерывание по таймеру для осн двигателя s1 = not(s1); digitalWrite(MainStStep, s1); Steps++; } ISR(TIMER2_B) { //прерывание по таймеру для двигателя укладчика if (MoveStCurrentPosition < MoveStTarget) { digitalWrite(MoveStDir, 0); MoveStCurrentPosition++; } if (MoveStCurrentPosition > MoveStTarget) { digitalWrite(MoveStDir, 1); MoveStCurrentPosition--; } if (MoveStCurrentPosition != MoveStTarget) { s2 = not(s2); digitalWrite(MoveStStep, s2); } } void loop() { bus.poll(modbus_array, 2); //Принимаем данные о номере катушки и рарешении на работу по Modbus regulator.Compute(); // Вычисляем ПИД if (!NowGoingHome && OutOfRoll && (abs(MoveStCurrentPosition - MoveStTarget) < 10) ) { // достгли левого края новой катушки OutOfRoll = 0; Direction = 1; //направо Row = 0; FilamentWidth = 3; regulator.SetTunings(KP, 1, 0); //Serial.print(" I am in roll! spd 600 "); Serial.print(" CurrentPosition: "); Serial.print(MoveStCurrentPosition); Timer2.setFrequency(600); //Serial.print(" Target after: "); Serial.println(MoveStTarget); } if ((isEnabe) && (millis() - MainStSpeedUpdateTimer > PIDInterval) && (AvgAnalogRead > 160) ) { // отправка скорости на мотор MainStSpeedUpdateTimer = millis(); Input = AvgAnalogRead; //ПИД вход с датчика Speed = int(Output); //ПИД результат Timer1.setFrequency(Speed); //обновляем скорость } noInterrupts(); if (!NowGoingHome && (modbus_array[1] != RollNum) && (modbus_array[1] < 11)) { // поступил сигнал "следующая катушка" RollNum = modbus_array[1]; OutOfRoll = 1; //вне катушки, нужно быстренько ехать к новой Timer2.setFrequency(5000); // увеличиваем скорость укладчика MoveStTarget = ((RollNum - 1) * StepsForMM * (RollWidth + RollSide) + StepsForMM * ShiftWidthLeft); //едь сюда к левой стенке следующей катушки Serial.print("Next roll spd 5000 MoveStTarget: "); Serial.println(MoveStTarget); } if ((AvgAnalogRead > 160) && (isEnabe) && (!NowGoingHome)) { //включена работа if (!OutOfRoll) { //таскаем туда сюда, если не переход на след катушку SpinsNow = Steps / 1600 / PeredatochnoeChislo; if (SpinsNow > Spins) { // каждый оборот сдвинуться Spins = SpinsNow; if (Direction) { MoveStTarget = MoveStTarget + StepsForMM * FilamentWidth; } else { MoveStTarget = MoveStTarget - StepsForMM * FilamentWidth; } if (MoveStTarget < LeftSide[RollNum]) { MoveStTarget = MoveStTarget + 2 * StepsForMM * FilamentWidth; Direction = !Direction; //меняем напрвление Row++; } if (MoveStTarget > RightSide[RollNum]) { MoveStTarget = MoveStTarget - 2 * StepsForMM * FilamentWidth; Direction = !Direction; //меняем напрвление Row++; } } if (Row > 2) { FilamentWidth = 2; } if (Row > 5) { regulator.SetTunings(10, 1, 0); //После первых пяти слое намотки уменьшаем KP ПИД для более плавной работы } } } else { Timer1.pause(); } interrupts(); if (millis() - AnalogReadTimer > 50) { // контролируем скорость с датчика угла провисания AnalogReadTimer = millis(); AvgAnalogRead = 0.8 * AvgAnalogRead + 0.2 * analogRead(AnalogSignal); //бегущее среднее для датчика } if (!digitalRead(ButtonPin)) { //нажали кнопку Домой delay(50); if (!digitalRead(ButtonPin)) { MoveStTarget = MoveStCurrentPosition; //остановка Timer2.setFrequency(5000); MoveStTarget = -1000000; Serial.println("Go home"); NowGoingHome = 1; } } if (!digitalRead(LeftStop) && (NowGoingHome)) { // сработал левый концевик NowGoingHome = 0; // Serial.println("Iam home, go to start point"); MoveStCurrentPosition = 0; MoveStTarget = StepsForMM * ShiftWidthLeft; // После калибровки отправляем ползун чуть правее в начало первой катушки RollNum = 1; Direction = 1; OutOfRoll = 0; Row = 0; FilamentWidth = 3; regulator.SetTunings(KP, 1, 0); Timer2.setFrequency(600); } if (modbus_array[0] == 1) { isEnableTimer = millis(); isEnabe = 1; } if ((modbus_array[0] == 0) && ((millis() - isEnableTimer) > 5000)) { Timer1.pause(); isEnabe = 0; digitalWrite(MainStEnb, 1); } // Разрешение на работу от мастера if (millis() - LEDTimer > 500) { //мигаем LEDTimer = millis(); ledState = !ledState; digitalWrite(ledRXTXPin, ledState); //Serial.println(" LED "); Serial.println(); Serial.print(" [0]: "); Serial.print(modbus_array[0]); Serial.print(" [1]: "); Serial.print(modbus_array[1]); Serial.print(" OutOfRoll: "); Serial.print(OutOfRoll); Serial.print(" RollNum: "); Serial.print(RollNum); Serial.print(" FilamentWidth: "); Serial.print(FilamentWidth); Serial.print(" Steps: "); Serial.print(Steps); Serial.print(" SpinsNow: "); Serial.print(SpinsNow); Serial.print(" Spins: "); Serial.print(Spins); Serial.print(" CurrentPosition: "); Serial.print(MoveStCurrentPosition); Serial.print(" Target>> "); Serial.print(MoveStTarget); Serial.print(" Left: "); Serial.print(LeftSide[RollNum]); Serial.print(" Right: "); Serial.print(RightSide[RollNum]); } interrupts(); }вы точно уверены что компилятор загнал ее в ОЗУ, а не в регистр?
Вот этого я не знаю... =(
поправьте код, криво вставился
у вас строки огромного размера, разбейте их покороче. чтоб были не длиннее 100-120 символов
у вас что, почти во всем loop() отключены прерывания? и вы при этом пытаетесь с модбасом работать и в Сериал печатать? Вы ничего в прерываниях не смыслите, что ли?
Вам же на гайвере уже пытались обьяснить, что так делать нельзя!
Прерывания нужно отключать только для того, чтобы передать значения переменных из обработчика в основной код. У вас в прерываниях меняются две переменные - MoveStCurrentPosition и Steps. Создайте для них псевдонимы для работы в ЛУП и выключайте прерывания только на время копирования значений (на ДВЕ СТРОЧКИ КОДА!) и тут же включайте обратно.
Я уже пробовал и так и эдак.
Прерывания отключены только на части вычисления координат.
Как в куске кода где отключены прерывания, переменная сама поменяла свое значение?
Некоректный элсе иф. Это первое что попало на глаза.
Приведите скетч в нормальный вид и эту ошибку сами увидите.
В коде есть пид регулятор, который использует указатели:
И два массива:
long LeftSide[11]; long RightSide[11]; unsigned int modbus_array[2] = {0, 1};Они как то могут "портить" мою переменную?
"Портить" переменную могут не сами массивы, а некорректная работа с ними. Например, попытка обратиться к первым двум по индексу равному 11 или к третьему - по индексу равному 3.
Некоректный элсе иф. Это первое что попало на глаза.
Приведите скетч в нормальный вид и эту ошибку сами увидите.
Привел в читабельный вид. В упор не вижу ошибки по if- else. Она еще есть?
#define MainStEnb 10 //Основной ШД #define MainStDir 9 #define MainStStep 8 #define MoveStEnb 13 //Укладчик ШД #define MoveStDir 12 #define MoveStStep 11 #define ledPin 3 #define ledRXTXPin 2 #define AnalogSignal A1// датчик провисания(угол) #define ButtonPin A0 //кнопка "Домой" #define LeftStop A2 // концевой выключатель для калибровки ноля #include <ModbusRtu.h> #include <PID_v1.h> #include <GyverTimers.h> const int KP = 26; // коэффициент пропорциональности ПИД, иногда меняется от глубины намотки текущей катушки double Setpoint, Input, Output; PID regulator(&Input, &Output, &Setpoint, KP, 1, 0, REVERSE); unsigned int StepsForMM = 200, RollWidth = 50; // ширина наматываемой части unsigned int ShiftWidthLeft = 2; //отступ слева от концевого выключателя const float RollSide = 12.5; //суммарная толщина бортиков катушек const float PeredatochnoeChislo = 3.1; //передаточное число между шестернями привода unsigned int FilamentWidth = 3; // ширина занимаемая одним витком 3 на первом ряду затем 2 const unsigned int MainSpeedMax = 4200; // макс скорость const unsigned int MainSpeedMin = 0; //минимальная скокрость работы - 0 - стоп const int PIDInterval = 100; //интервал обработки датчика провисания в мс volatile bool s1 = 0; volatile bool s2 = 0; volatile unsigned long Steps = 0; //шаги онсновного привода volatile long MoveStCurrentPosition = 0; //текущая координата volatile long MoveStTarget = 0; // цель для ползуна const int AngleConst = 245; //угол в аналогрид(0-1023) нечто среднее между 210(верх) и 300 (нижнее положение ролика) unsigned int RollNum = 1; //номер катушки unsigned int Speed = 2000; //частота таймера осн двиг unsigned int MoveStSpeed = 600; //частота(скорость) частота вращения мотора укладчика volatile unsigned int SpinsNow = 0; //обороты volatile unsigned int Spins = 0; //обороты int Row = 0; // ряд long LeftSide[11]; long RightSide[11]; bool isEnabe = 0; // выключатель bool Direction = 1; // направление хода укладчика один это двигаться направо bool NowGoingHome = 0; //сейчас еду домой bool OutOfRoll = 0; // укладчик находится вне диапазона намотки, нужно для увеличения скокрости укладчика относительно намотки int AvgAnalogRead = 0; //средние значения с датчика unsigned long LEDTimer, AnalogReadTimer, MainStSpeedUpdateTimer, isEnableTimer = 0; //таймеры bool ledState = 0; unsigned int modbus_array[2] = {0, 1}; //Готовим массив данных "разрешно работать 0/1" и "номер катушки" Modbus bus(4, Serial, 4); // this is slave 4, Serial 0, and RS-485 (4 pin for enable) void setup() { pinMode(MainStEnb, OUTPUT); // Инициализация осноного мотора pinMode(MainStDir, OUTPUT); pinMode(MainStStep, OUTPUT); pinMode(MoveStEnb, OUTPUT); // Инициализация мотора укладчика pinMode(MoveStDir, OUTPUT); pinMode(MoveStStep, OUTPUT); pinMode(ledPin, OUTPUT); pinMode(ledRXTXPin, OUTPUT); pinMode(LeftStop, INPUT); //концевик слева digitalWrite(LeftStop, HIGH); pinMode(ButtonPin, INPUT); //кнопка Домой digitalWrite(ButtonPin, HIGH); // Инициализация и параметры ПИД Setpoint = AngleConst; regulator.SetMode(AUTOMATIC); regulator.SetOutputLimits(MainSpeedMin, MainSpeedMax); regulator.SetSampleTime(PIDInterval); Serial.begin(19200); bus.start(); Serial.println("Start"); for (int i = 1; i <= 10; i++) { //расчитываем параметры катушек LeftSide[i] = ((i - 1) * StepsForMM * (RollWidth + RollSide) + StepsForMM * ShiftWidthLeft); RightSide[i] = LeftSide[i] + StepsForMM * RollWidth; Serial.print("i: "); Serial.print(i); Serial.print(" "); Serial.print(LeftSide[i]); Serial.print("<< >>"); Serial.println(RightSide[i]); } Timer1.setFrequency(Speed); //частота таймера Timer1.enableISR(CHANNEL_B); // Подключить прерывание таймера 1, канал B Timer2.setFrequency(MoveStSpeed); //частота таймера Timer2.enableISR(CHANNEL_B); // Подключить прерывание таймера 2, канал B //при генерации меандра реальная частота будет в два раза меньше заданной из-за особенности работы самого таймера. } ISR(TIMER1_B) { //прерывание по таймеру для осн двигателя s1 = not(s1); digitalWrite(MainStStep, s1); Steps++; } ISR(TIMER2_B) { //прерывание по таймеру для двигателя укладчика if (MoveStCurrentPosition < MoveStTarget) { digitalWrite(MoveStDir, 0); MoveStCurrentPosition++; } if (MoveStCurrentPosition > MoveStTarget) { digitalWrite(MoveStDir, 1); MoveStCurrentPosition--; } if (MoveStCurrentPosition != MoveStTarget) { s2 = not(s2); digitalWrite(MoveStStep, s2); } } void loop() { bus.poll(modbus_array, 2); //Принимаем данные о номере катушки и рарешении на работу по Modbus regulator.Compute(); // Вычисляем ПИД if (!NowGoingHome && OutOfRoll && (abs(MoveStCurrentPosition - MoveStTarget) < 10) ) { // достгли левого края новой катушки OutOfRoll = 0; Direction = 1; //направо Row = 0; FilamentWidth = 3; regulator.SetTunings(KP, 1, 0); //Serial.print(" I am in roll! spd 600 "); Serial.print(" CurrentPosition: "); Serial.print(MoveStCurrentPosition); Timer2.setFrequency(600); //Serial.print(" Target after: "); Serial.println(MoveStTarget); } if ((isEnabe) && (millis() - MainStSpeedUpdateTimer > PIDInterval) && (AvgAnalogRead > 160) ) { // отправка скорости на мотор MainStSpeedUpdateTimer = millis(); Input = AvgAnalogRead; //ПИД вход с датчика Speed = int(Output); //ПИД результат Timer1.setFrequency(Speed); //обновляем скорость } noInterrupts(); if (!NowGoingHome && (modbus_array[1] != RollNum) && (modbus_array[1] < 11)) { // поступил сигнал "следующая катушка" RollNum = modbus_array[1]; OutOfRoll = 1; //вне катушки, нужно быстренько ехать к новой Timer2.setFrequency(5000); // увеличиваем скорость укладчика MoveStTarget = ((RollNum - 1) * StepsForMM * (RollWidth + RollSide) + StepsForMM * ShiftWidthLeft); //едь сюда к левой стенке следующей катушки Serial.print("Next roll spd 5000 MoveStTarget: "); Serial.println(MoveStTarget); } if ((AvgAnalogRead > 160) && (isEnabe) && (!NowGoingHome)) { //включена работа if (!OutOfRoll) { //таскаем туда сюда, если не переход на след катушку SpinsNow = Steps / 1600 / PeredatochnoeChislo; if (SpinsNow > Spins) { // каждый оборот сдвинуться Spins = SpinsNow; if (Direction) { MoveStTarget = MoveStTarget + StepsForMM * FilamentWidth; } else { MoveStTarget = MoveStTarget - StepsForMM * FilamentWidth; } if (MoveStTarget < LeftSide[RollNum]) { MoveStTarget = MoveStTarget + 2 * StepsForMM * FilamentWidth; Direction = !Direction; //меняем напрвление Row++; } if (MoveStTarget > RightSide[RollNum]) { MoveStTarget = MoveStTarget - 2 * StepsForMM * FilamentWidth; Direction = !Direction; //меняем напрвление Row++; } } if (Row > 2) { FilamentWidth = 2; } if (Row > 5) { regulator.SetTunings(10, 1, 0); //После первых пяти слое намотки уменьшаем KP ПИД для более плавной работы } } } else { Timer1.pause(); } interrupts(); if (millis() - AnalogReadTimer > 50) { // контролируем скорость с датчика угла провисания AnalogReadTimer = millis(); AvgAnalogRead = 0.8 * AvgAnalogRead + 0.2 * analogRead(AnalogSignal); //бегущее среднее для датчика } if (!digitalRead(ButtonPin)) { //нажали кнопку Домой delay(50); if (!digitalRead(ButtonPin)) { MoveStTarget = MoveStCurrentPosition; //остановка Timer2.setFrequency(5000); MoveStTarget = -1000000; Serial.println("Go home"); NowGoingHome = 1; } } if (!digitalRead(LeftStop) && (NowGoingHome)) { // сработал левый концевик NowGoingHome = 0; // Serial.println("Iam home, go to start point"); MoveStCurrentPosition = 0; MoveStTarget = StepsForMM * ShiftWidthLeft; // После калибровки отправляем ползун чуть правее в начало первой катушки RollNum = 1; Direction = 1; OutOfRoll = 0; Row = 0; FilamentWidth = 3; regulator.SetTunings(KP, 1, 0); Timer2.setFrequency(600); } if (modbus_array[0] == 1) { isEnableTimer = millis(); isEnabe = 1; } if ((modbus_array[0] == 0) && ((millis() - isEnableTimer) > 5000)) { Timer1.pause(); isEnabe = 0; digitalWrite(MainStEnb, 1); } // Разрешение на работу от мастера if (millis() - LEDTimer > 500) { //мигаем LEDTimer = millis(); ledState = !ledState; digitalWrite(ledRXTXPin, ledState); Serial.println(); Serial.print(" [0]: "); Serial.print(modbus_array[0]); Serial.print(" [1]: "); Serial.print(modbus_array[1]); Serial.print(" OutOfRoll: "); Serial.print(OutOfRoll); Serial.print(" RollNum: "); Serial.print(RollNum); Serial.print(" FilamentWidth: "); Serial.print(FilamentWidth); Serial.print(" Steps: "); Serial.print(Steps); Serial.print(" SpinsNow: "); Serial.print(SpinsNow); Serial.print(" Spins: "); Serial.print(Spins); Serial.print(" CurrentPosition: "); Serial.print(MoveStCurrentPosition); Serial.print(" Target>> "); Serial.print(MoveStTarget); Serial.print(" Left: "); Serial.print(LeftSide[RollNum]); Serial.print(" Right: "); Serial.print(RightSide[RollNum]); } }ТС, если у вас таблица параметров катушек содержит 10 значений, зачем вы сделали массив на 11 элементов? Не можете привыкнуть, что в С массивы с нуля?:)
Это может быть источником ошибок, потому что вы не учитываете что будет, если из модбаса придет параметр =0
Вы правы, добавил в строке 146 проверку:
#define MainStEnb 10 //Основной ШД #define MainStDir 9 #define MainStStep 8 #define MoveStEnb 13 //Укладчик ШД #define MoveStDir 12 #define MoveStStep 11 #define ledPin 3 #define ledRXTXPin 2 #define AnalogSignal A1// датчик провисания(угол) #define ButtonPin A0 //кнопка "Домой" #define LeftStop A2 // концевой выключатель для калибровки ноля #include <ModbusRtu.h> #include <PID_v1.h> #include <GyverTimers.h> const int KP = 26; // коэффициент пропорциональности ПИД, иногда меняется от глубины намотки текущей катушки double Setpoint, Input, Output; PID regulator(&Input, &Output, &Setpoint, KP, 1, 0, REVERSE); unsigned int StepsForMM = 200, RollWidth = 50; // ширина наматываемой части unsigned int ShiftWidthLeft = 2; //отступ слева от концевого выключателя const float RollSide = 12.5; //суммарная толщина бортиков катушек const float PeredatochnoeChislo = 3.1; //передаточное число между шестернями привода unsigned int FilamentWidth = 3; // ширина занимаемая одним витком 3 на первом ряду затем 2 const unsigned int MainSpeedMax = 4200; // макс скорость const unsigned int MainSpeedMin = 0; //минимальная скокрость работы - 0 - стоп const int PIDInterval = 100; //интервал обработки датчика провисания в мс volatile bool s1 = 0; volatile bool s2 = 0; volatile unsigned long Steps = 0; //шаги онсновного привода volatile long MoveStCurrentPosition = 0; //текущая координата volatile long MoveStTarget = 0; // цель для ползуна const int AngleConst = 245; //угол в аналогрид(0-1023) нечто среднее между 210(верх) и 300 (нижнее положение ролика) unsigned int RollNum = 1; //номер катушки unsigned int Speed = 2000; //частота таймера осн двиг unsigned int MoveStSpeed = 600; //частота(скорость) частота вращения мотора укладчика volatile unsigned int SpinsNow = 0; //обороты volatile unsigned int Spins = 0; //обороты int Row = 0; // ряд long LeftSide[11]; long RightSide[11]; bool isEnabe = 0; // выключатель bool Direction = 1; // направление хода укладчика один это двигаться направо bool NowGoingHome = 0; //сейчас еду домой bool OutOfRoll = 0; // укладчик находится вне диапазона намотки, нужно для увеличения скокрости укладчика относительно намотки int AvgAnalogRead = 0; //средние значения с датчика unsigned long LEDTimer, AnalogReadTimer, MainStSpeedUpdateTimer, isEnableTimer = 0; //таймеры bool ledState = 0; unsigned int modbus_array[2] = {0, 1}; //Готовим массив данных "разрешно работать 0/1" и "номер катушки" Modbus bus(4, Serial, 4); // this is slave 4, Serial 0, and RS-485 (4 pin for enable) void setup() { pinMode(MainStEnb, OUTPUT); // Инициализация осноного мотора pinMode(MainStDir, OUTPUT); pinMode(MainStStep, OUTPUT); pinMode(MoveStEnb, OUTPUT); // Инициализация мотора укладчика pinMode(MoveStDir, OUTPUT); pinMode(MoveStStep, OUTPUT); pinMode(ledPin, OUTPUT); pinMode(ledRXTXPin, OUTPUT); pinMode(LeftStop, INPUT); //концевик слева digitalWrite(LeftStop, HIGH); pinMode(ButtonPin, INPUT); //кнопка Домой digitalWrite(ButtonPin, HIGH); // Инициализация и параметры ПИД Setpoint = AngleConst; regulator.SetMode(AUTOMATIC); regulator.SetOutputLimits(MainSpeedMin, MainSpeedMax); regulator.SetSampleTime(PIDInterval); Serial.begin(19200); bus.start(); Serial.println("Start"); for (int i = 1; i <= 10; i++) { //расчитываем параметры катушек LeftSide[i] = ((i - 1) * StepsForMM * (RollWidth + RollSide) + StepsForMM * ShiftWidthLeft); RightSide[i] = LeftSide[i] + StepsForMM * RollWidth; Serial.print("i: "); Serial.print(i); Serial.print(" "); Serial.print(LeftSide[i]); Serial.print("<< >>"); Serial.println(RightSide[i]); } Timer1.setFrequency(Speed); //частота таймера Timer1.enableISR(CHANNEL_B); // Подключить прерывание таймера 1, канал B Timer2.setFrequency(MoveStSpeed); //частота таймера Timer2.enableISR(CHANNEL_B); // Подключить прерывание таймера 2, канал B //при генерации меандра реальная частота будет в два раза меньше заданной из-за особенности работы самого таймера. } ISR(TIMER1_B) { //прерывание по таймеру для осн двигателя s1 = not(s1); digitalWrite(MainStStep, s1); Steps++; } ISR(TIMER2_B) { //прерывание по таймеру для двигателя укладчика if (MoveStCurrentPosition < MoveStTarget) { digitalWrite(MoveStDir, 0); MoveStCurrentPosition++; } if (MoveStCurrentPosition > MoveStTarget) { digitalWrite(MoveStDir, 1); MoveStCurrentPosition--; } if (MoveStCurrentPosition != MoveStTarget) { s2 = not(s2); digitalWrite(MoveStStep, s2); } } void loop() { bus.poll(modbus_array, 2); //Принимаем данные о номере катушки и рарешении на работу по Modbus regulator.Compute(); // Вычисляем ПИД if ((isEnabe) && (millis() - MainStSpeedUpdateTimer > PIDInterval) && (AvgAnalogRead > 160) ) { // отправка скорости на мотор MainStSpeedUpdateTimer = millis(); Input = AvgAnalogRead; //ПИД вход с датчика Speed = int(Output); //ПИД результат Timer1.setFrequency(Speed); //обновляем скорость } if (!NowGoingHome && OutOfRoll && (abs(MoveStCurrentPosition - MoveStTarget) < 10) ) { // достгли левого края новой катушки OutOfRoll = 0; Direction = 1; //направо Row = 0; FilamentWidth = 3; regulator.SetTunings(KP, 1, 0); //Serial.print(" I am in roll! spd 600 "); Serial.print(" CurrentPosition: "); Serial.print(MoveStCurrentPosition); Timer2.setFrequency(600); } noInterrupts(); if (!NowGoingHome && (modbus_array[1] != RollNum) && (modbus_array[1] > 0)&& (modbus_array[1] < 11)) { // следующая катушка RollNum = modbus_array[1]; OutOfRoll = 1; //вне катушки, нужно быстренько ехать к новой Timer2.setFrequency(5000); // увеличиваем скорость укладчика MoveStTarget = ((RollNum - 1) * StepsForMM * (RollWidth + RollSide) + StepsForMM * ShiftWidthLeft); //едь сюда к левой стенке следующей катушки Serial.print("Next roll spd 5000 MoveStTarget: "); Serial.println(MoveStTarget); } if ((AvgAnalogRead > 160) && (isEnabe) && (!NowGoingHome)) { //включена работа if (!OutOfRoll) { //таскаем туда сюда, если не переход на след катушку SpinsNow = Steps / 1600 / PeredatochnoeChislo; if (SpinsNow > Spins) { // каждый оборот сдвинуться Spins = SpinsNow; if (Direction) { MoveStTarget = MoveStTarget + StepsForMM * FilamentWidth; } else { MoveStTarget = MoveStTarget - StepsForMM * FilamentWidth; } if (MoveStTarget < LeftSide[RollNum]) { MoveStTarget = MoveStTarget + 2 * StepsForMM * FilamentWidth; Direction = !Direction; //меняем напрвление Row++; } if (MoveStTarget > RightSide[RollNum]) { MoveStTarget = MoveStTarget - 2 * StepsForMM * FilamentWidth; Direction = !Direction; //меняем напрвление Row++; } } if (Row > 2) { FilamentWidth = 2; } if (Row > 5) { regulator.SetTunings(10, 1, 0); //уменьшаем KP ПИД для более плавной работы } } } else { Timer1.pause(); } interrupts(); if (millis() - AnalogReadTimer > 50) { // контролируем скорость с датчика угла провисания AnalogReadTimer = millis(); AvgAnalogRead = 0.8 * AvgAnalogRead + 0.2 * analogRead(AnalogSignal); //бегущее среднее } if (!digitalRead(ButtonPin)) { //нажали кнопку Домой delay(50); if (!digitalRead(ButtonPin)) { MoveStTarget = MoveStCurrentPosition; //остановка Timer2.setFrequency(5000); MoveStTarget = -1000000; Serial.println("Go home"); NowGoingHome = 1; } } if (!digitalRead(LeftStop) && (NowGoingHome)) { // сработал левый концевик NowGoingHome = 0; MoveStCurrentPosition = 0; RollNum = 1; MoveStTarget = LeftSide[RollNum]; // После калибровки отправляем укладчик правее в начало первой катушки Direction = 1; OutOfRoll = 0; Row = 0; FilamentWidth = 3; regulator.SetTunings(KP, 1, 0); Timer2.setFrequency(600); } if (modbus_array[0] == 1) { isEnableTimer = millis(); isEnabe = 1; } if ((modbus_array[0] == 0) && ((millis() - isEnableTimer) > 5000)) { Timer1.pause(); isEnabe = 0; digitalWrite(MainStEnb, 1); } // Разрешение на работу от мастера if (millis() - LEDTimer > 500) { //мигаем LEDTimer = millis(); ledState = !ledState; digitalWrite(ledRXTXPin, ledState); Serial.println(); Serial.print(" [0]: "); Serial.print(modbus_array[0]); Serial.print(" [1]: "); Serial.print(modbus_array[1]); Serial.print(" OutOfRoll: "); Serial.print(OutOfRoll); Serial.print(" RollNum: "); Serial.print(RollNum); Serial.print(" FilamentWidth: "); Serial.print(FilamentWidth); Serial.print(" Steps: "); Serial.print(Steps); Serial.print(" SpinsNow: "); Serial.print(SpinsNow); Serial.print(" Spins: "); Serial.print(Spins); Serial.print(" CurrentPosition: "); Serial.print(MoveStCurrentPosition); Serial.print(" Target>> "); Serial.print(MoveStTarget); Serial.print(" Left: "); Serial.print(LeftSide[RollNum]); Serial.print(" Right: "); Serial.print(RightSide[RollNum]); } }добавил в строке 146 проверку:
помогло?
пока без ошибок, тестирую. спасибо!