Корректное управление 4 сервами
- Войдите на сайт для отправки комментариев
Вс, 07/05/2017 - 19:59
Уважаемые коллеги,
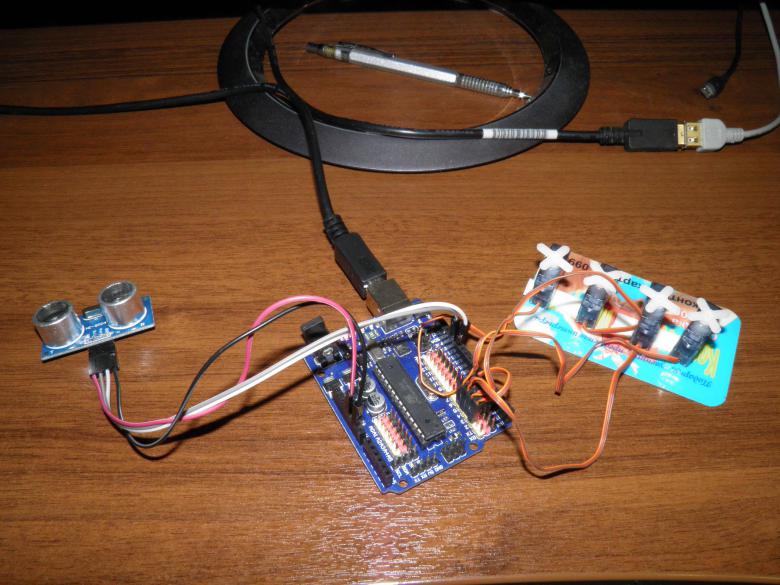
прошу подсказки по управлению серво.
Имеется простая прога:
#include <Servo.h> //библиотека серво
#define trigPin 13 //пин передатчика
#define echoPin 12 //пин приемника
#define MAXSERVO 4 //число серв в проекте
#define MAXANGLE 180 //максимальный угол° поворота сервы
#define MINANGLE 0 //минимальный угол° поворота сервы
Servo servo[MAXSERVO]; //задание массива серв
int servo_pin[MAXSERVO] = {2,3,4,5}; //задание пинов подключения серв
long servo_angle[MAXSERVO] = {MINANGLE, //задание начального угла разворота сервы №1
MINANGLE, //задание начального угла разворота сервы №2
MINANGLE, //задание начального угла разворота сервы №3
MINANGLE};//задание начального угла разворота сервы №4
int servo_direct[MAXSERVO] = {0,0,0,0}; //начальное направление вращения каждой сервы
void AngleServo(int servo_num); //функция разворота каждой сервы на заданный угол (по закоу: вращаем на MAXANGLE-MINANGLE в одну сторону и обратно)
long GetDistance(int trig_pin, int echo_pin); //функция вычисления дистанции (надстройка над функциями библиотеки серво)
void setup()
{
pinMode(trigPin, OUTPUT); //инициализация ультразвукового дальномера
pinMode(echoPin, INPUT);
for(int i=0; i<MAXSERVO; i++)
{
servo[i].attach(servo_pin[i]); //инициализация серв
servo[i].write(servo_angle[i]); //(строка нужна, если начальный угол серв отличен от 0°, по умолчанию компилятор выводит все серво на 0°)
}
}
void loop()
{
long distance = GetDistance(trigPin,echoPin); //вычисление дистанции дальномером
if(distance<50) AngleServo(0); //если дистанция меньше 50 см - вращаем серву №1
if(distance<30) AngleServo(1); //если дистанция меньше 30 см - вращаем серву №1,2
if(distance<10) AngleServo(2); //если дистанция меньше 10 см - вращаем серву №1,2,3
if(distance< 5) AngleServo(3); //если дистанция меньше 5 см - вращаем серву №1,2,3,4
delay(15);
}
void AngleServo(int servo_num)
{
if(servo_direct[servo_num]==1 && servo_angle[servo_num] <MAXANGLE) servo_angle [servo_num]++;
if(servo_direct[servo_num]==1 && servo_angle[servo_num]==MAXANGLE) servo_direct[servo_num]=0;
if(servo_direct[servo_num]==0 && servo_angle[servo_num] >MINANGLE) servo_angle [servo_num]--;
if(servo_direct[servo_num]==0 && servo_angle[servo_num]==MINANGLE) servo_direct[servo_num]=1;
servo[servo_num].write(servo_angle[servo_num]);
return;
}
long GetDistance(int trig_pin, int echo_pin)
{
digitalWrite(trig_pin, LOW);
delayMicroseconds(2);
digitalWrite(trig_pin, HIGH);
delayMicroseconds(10);
digitalWrite(trig_pin, LOW);
long duration = pulseIn(echo_pin, HIGH);
return ((duration/2) / 29.1);
}
- при минимальном и максимальном значении угла 0 и 180° все 4 сервы работают как надо, но при изменении пределов, например от 160 до 180°- одна или две еле дергаются, не отрабатывают свои 20°. В чем засада?
Спасибо.
С уважением, Владимир.