Помогите разобраться - интегратор - Simulink - Arduino
- Войдите на сайт для отправки комментариев
Чт, 02/05/2013 - 18:51
Здравствуйте!
Помогите разобраться - как правильно настроить работу интегратора в Simulink, чтобы Ардуино 2560 корректно воспроизводил интегрирование.
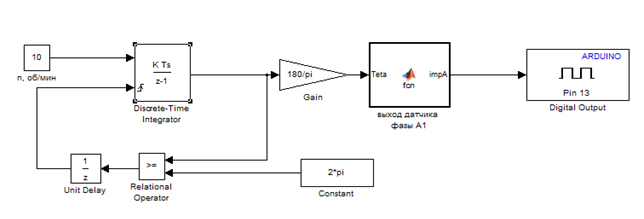
Я рассматриваю простой пример - пусть вал двигателя вращается с частотой 10 об/мин. На валу установлен оптический датчик, который в промежутке угловых положений ротора от 0 до 5 механических градусов вырабатывает логическую единицу и передает ее на светодиод (выход 13 ардуино), частота мигания которого должна быть - 1 "моргание" на 6 секунд - т.е. 0,167 Гц.
Ротор и датчик в моем случае пока вируальные. Вращения ротора я воспроизвожу с помощью накопления угла положения ротора интегратором. Учитываю все переходы к радианам из градусной меры.
Контур обратной связи в цепи интегратора служит для его обнуления когда угол положения ротора превышает 360 градусов.
При моделировании в Simulink все работает нормально.
А при запуске программы на плате частота мигания светодиода получается очень-очень маленькой. Порядка одного мигания на 2-3 минуты. Как будто контроллер при интегрировании привязан не к реальному времени, а к какому-то другому.
Помогите пожалуйста, похоже я упускаю, что-то важное.
Не поможем, учитесь писать программный код.