проект Arduino не хочет работать(Bluetooth Problems)
- Войдите на сайт для отправки комментариев
Чт, 01/12/2016 - 11:35
#include <Servo.h>
Servo myservo; // create servo object to control a servo
static const int trigPinUltraSonic1 = 2;
static const int trigPinUltraSonic2 = 7;
static const int echoPinUltraSonic1 = 4;
static const int echoPinUltraSonic2 = 8;
char passwordAdmin[4] = {'A','B','C','D'};
char passwordUser[4];
byte pass_correct = 0;
void setup() {
// initialize serial communication:
//UltraSonic Setup
pinMode(trigPinUltraSonic1, OUTPUT);
pinMode(trigPinUltraSonic2, OUTPUT);
pinMode(echoPinUltraSonic1, INPUT);
pinMode(echoPinUltraSonic2, INPUT);
//Serial Setup
Serial.begin(9600);
//Servo Setup
myservo.attach(9); // attaches the servo on pin 9 to the servo object
//LCD Setup
}
void loop() {
long durationUltraSonic, cm1, cm2;
digitalWrite(trigPinUltraSonic1, LOW);
delayMicroseconds(2);
digitalWrite(trigPinUltraSonic1, HIGH);
delayMicroseconds(20);
digitalWrite(trigPinUltraSonic1, LOW);
durationUltraSonic = pulseIn(echoPinUltraSonic1, HIGH);
// convert the time into a distance
cm1 = microsecondsToCentimeters(durationUltraSonic);
// the condition for the distance
if ( cm1 > 7 && cm1 < 14)//IIIIIIIIIIIIIIIIIIIIIIIIIMMMMMMMMMMMMMMMMMMMMMMMMMMMMMMPPPPPPPPPPPPPPPPPPPPPPPPPPPOOOOOOOOOOOOOOOOOOOOOOOOOOOOOORRRRRRRRRRRRRRRRRRRRRRRRRRRTTTTTTTTTTTTTTTTTTTTTTTTTTTTTTAAAAAAAAAAAAAAAAAAAAAAAANNNNNNNNNNNNNNNNNNNNNNTTTTTTTTTTTTTTTTTTT
{
if ( Serial.available() > 0){
for( int i = 0; i < 4; i++){
passwordUser[i] = Serial.read();
}
for ( int i = 0; i < 4; i++){
if(passwordAdmin[i] == passwordUser[i])
pass_correct++;
}
}
if ( pass_correct == 4){
myservo.write(140);
pass_correct = 0;
gateClosingOperation(durationUltraSonic, cm2);
}
}
else if ( cm1 < 8)
{
myservo.write(40); // sets the servo position according to the scaled value
delay(100);
}
else if ( cm1 > 14)
{
myservo.write(40); // sets the servo position according to the scaled value
delay(100);
}
delay(20);
}
long microsecondsToCentimeters(long microseconds) {
// The speed of sound is 340 m/s or 29 microseconds per centimeter.
// The ping travels out and back, so to find the distance of the
// object we take half of the distance travelled.
return microseconds / 29 / 2;
}
void gateClosingOperation (long durationUltraSonic, long cm2){
delay(100);
while(true){
digitalWrite(trigPinUltraSonic2, LOW);
delayMicroseconds(2);
digitalWrite(trigPinUltraSonic2, HIGH);
delayMicroseconds(20);
digitalWrite(trigPinUltraSonic2, LOW);
durationUltraSonic = pulseIn(echoPinUltraSonic2, HIGH);
cm2 = microsecondsToCentimeters(durationUltraSonic);
if ( cm2 > 7 && cm2 < 14){
myservo.write(40); // sets the servo position according to the scaled value
break;
}
}
}
написал код на Bluetooth не хочет работать. не могу найти ошибку!
Помогите пожалуйста!
Помогите пожалуйста!
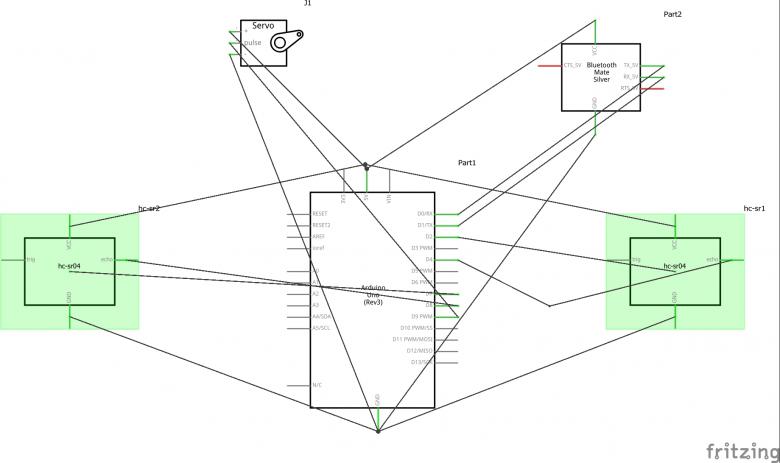
2) Нарисуйте нормальную схему, чтобы её читать можно было.
простите.
в двух словах . проекты для игрушечного домика . хотелось бы построить умную стоянку для машины , момент когда машина приезжает в диапазоне 7 до 14 сантиметров его распознаёт UltraSonic No1 (hc-sr01)после чего пользователь должен ввести пароль по bluetooth.если пароль совпадает ворота откроются (Servo +5) если жене Цикл начнется сначала.после того как ворота открылись ultrasonic 2 (hc-sr02)ждет пока машина проедет.ворота закрываются когда машина будет находиться в диапазоне 7 до 14 сантиметров(Servo 0).
проблема заключается в работе с Bluetooth.всё работает но Arduino никак не хочет получать значение от телефона.
Помогите пожалуйста!
Кто нибудь :(
Ребят помогите плиз
Ну, я же Вам писал почти неделю назад
2) Нарисуйте нормальную схему, чтобы её читать можно было.
Вы сами-то на ней что-нибудь видите?
Я не умею рисовать по другому !
По коду можно понять я все там ясно расписал и код опписал!
Denis1701, если Вы хотите получить помощь, не нужно создавать проблемы тем, кто мог бы ее оказать.