ШИМ и Серво
- Войдите на сайт для отправки комментариев
Сб, 11/03/2017 - 23:50

#include <Servo.h>
Servo myservo;
void setup() {
myservo.attach(3);
pinMode(10, OUTPUT);
}
void loop() {
int reading1 = analogRead(1);
int val = reading1 / 4;
analogWrite(10, val);
int val1 = analogRead(0);
int x = val1 / 6;
myservo.write(x);
}
Всем сдравствуйте. Подскажите как заставить работать ШИМ и Сервомотор в одной программе
/* #1 Серва1 упр. выв -> 12 (servo1_pin) +5В -> +5В GND -> GND #2 резистор нижний выв -> GND средний выв -> A0 (R1_pin) верхний выв -> +5 */ //#1 const int servo1_pin = 12; uint16_t servo1_value = 544 ; // величина на серве 544-2400 мкс. uint8_t servo1;// //#2 const int R1_pin = A0;// нога резистора void setup() { //#1 pinMode (servo1_pin, OUTPUT); digitalWrite (servo1_pin, servo1 = 0); //#2 } void loop() { //#1 20 миллисекунд обслуживание сервы 1 и 2 static uint32_t past_1 = 0 ; if (servo1 && (micros() - past_1 >= servo1_value)) digitalWrite (servo1_pin, servo1 = 0); if (micros() - past_1 >= 20000) { // если прошло 20000 микросек // это автозапуск импульса past_1 = micros() ; // вставьте эти команды в прерывание digitalWrite (servo1_pin, servo1 = 1); // и будет вам формирование нужного импульса } // при освобождении процессора //#2 static uint32_t past_2 = 0 ; if (millis() - past_2 >= 200) { // если прошло 200000 микросек past_2 = millis() ; servo1_value = map (analogRead(R1_pin), 0, 1023, 544, 2400); } }Спасибо за ответ. Если я правельно понял в вашем коде управление только сервомотором
Все эта идея задумывалась Для управление печкой.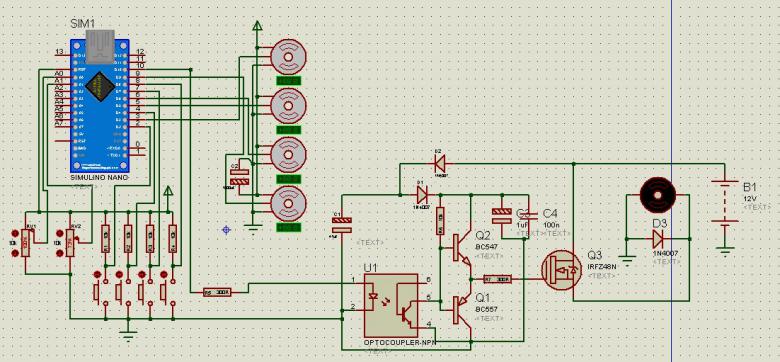
Сервомоторы управляют заслонками. Это все работает. Но не работает мотор винтелятора. ВОт мой код.
#include <Servo.h> String readString, servo1, servo2, servo3,servo4; Servo myservo1; Servo myservo2; Servo myservo3; Servo myservo4; int kn1 = 2; int kn2 = 4; int kn3 = 7; int kn4 = 8; int potPin1 = 0; int potPin2 = 1; void setup() { Serial.begin(9600); myservo1.attach(3); myservo2.attach(5); myservo3.attach(6); myservo4.attach(9); pinMode(kn1, INPUT); pinMode(kn2, INPUT); pinMode(kn3, INPUT); pinMode(kn4, INPUT); pinMode(10, OUTPUT); } void loop() { int reading = analogRead(potPin1); int angle = reading / 6; myservo1.write(angle); int reading1 = analogRead(potPin2); int val = reading1 / 4; Serial.println(val); analogWrite(10, val); if (digitalRead(kn4) == HIGH) { myservo2.write(150);} else { myservo2.write(30);} if (digitalRead(kn2) == HIGH) { myservo3.write(150);} else { myservo3.write(30);} if (digitalRead(kn1) == HIGH && digitalRead(kn3) == HIGH) { myservo4.write(90);} if (digitalRead(kn1) == LOW && digitalRead(kn3) == LOW) { myservo4.write(90);} if (digitalRead(kn1) == LOW && digitalRead(kn3) == HIGH) { myservo4.write(10);} if (digitalRead(kn1) == HIGH && digitalRead(kn3) == LOW) { myservo4.write(170);} }Скорее у вас зевок в схеме. Замените оптрон светодиодом у проверьте ШИМ программы.
Мне кажется , но для сервы шимированые выхода не обязательны.
Ура разобрался. Рересодил шим на 11 ногу и все зароботало
#include <Servo.h> String readString, servo1, servo2, servo3,servo4; Servo myservo1; Servo myservo2; Servo myservo3; Servo myservo4; int kn1 = 2; int kn2 = 4; int kn3 = 7; int kn4 = 8; int potPin1 = 0; int potPin2 = 1; void setup() { myservo1.attach(3); myservo2.attach(5); myservo3.attach(6); myservo4.attach(9); pinMode(kn1, INPUT); pinMode(kn2, INPUT); pinMode(kn3, INPUT); pinMode(kn4, INPUT); pinMode(11, OUTPUT); pinMode(1, OUTPUT); pinMode(0, OUTPUT); pinMode(12, OUTPUT); } void loop() { int reading = analogRead(potPin1); int angle = reading / 6; if (angle <= 10) { digitalWrite (12, LOW);} else {digitalWrite (12, HIGH);} myservo1.write(angle); int reading1 = analogRead(potPin2); int val = reading1 / 4; analogWrite(11, val); if (digitalRead(kn4) == HIGH) { myservo2.write(150);} else { myservo2.write(30);} if (digitalRead(kn2) == HIGH) { myservo3.write(150);} else { myservo3.write(30);} if (digitalRead(kn1) == HIGH && digitalRead(kn3) == HIGH) { myservo4.write(90);} if (digitalRead(kn1) == LOW && digitalRead(kn3) == LOW) { myservo4.write(90);} if (digitalRead(kn1) == LOW && digitalRead(kn3) == HIGH) { myservo4.write(10);} if (digitalRead(kn1) == HIGH && digitalRead(kn3) == LOW) { myservo4.write(170);} }qwone,
Похоже придется запускать программу по частям. Тем более мне работа схемы не понятно. Пожалуста составьте снова ТЗ или опишите работу устройства.
https://yadi.sk/d/Tcy7zWdm3JKcGY
Это сылка на файл в протеусе и ipg постарался зделать с хорошим расирением
Кнопка regim меняет выбор управления вентилятором или заслонкой горечо холодно, а также она при длительном нажатии выключает печку и включает.
Энкодер скорость вентилятора или положение заслонки гор хол
кнопка sb recirkul управляет моторчиком recirkul у него 2 положения закрыто или открыто.
кнопка obogrev алгоритм ее ты уже написал.
Реле (насос кран RL5) выключена когда заслонка в первом положение,а в остальных включена.
вроде все описал
Погоняй этот код
/*Cl_74HC595.ino */ //--------------------class Cl_wire_74HC595------------------------ class Cl_wire_74HC595 { byte Latch_pin; // вывод Latch byte CLK_pin; // вывод CLK byte Data_pin; // вывод Data byte max_device; // количество 74HC595 в шине byte * buffer; public: Cl_wire_74HC595 *pnt = NULL; // коструктор Cl_wire_74HC595(byte Latch, byte CLK, byte Data, byte device) : Latch_pin(Latch), CLK_pin(CLK), Data_pin(Data), max_device(device) {}; // setup() void setup() { if (this->pnt != NULL) this->pnt->setup(); buffer = new byte[max_device]; pinMode(Latch_pin, OUTPUT); pinMode(CLK_pin, OUTPUT); pinMode(Data_pin, OUTPUT); digitalWrite(Latch_pin, LOW); for (int i = max_device; i > 0; i--) shiftOut(Data_pin, CLK_pin, MSBFIRST, (*(buffer + i - 1) = 0)); digitalWrite(Latch_pin, HIGH); } // отправка байта в шину на опред микросх void transferOut(byte adr, byte data) { if (adr == 0 || adr > max_device)return; *(buffer + adr - 1) = data; digitalWrite(Latch_pin, LOW); for (int i = max_device; i > 0; i--) shiftOut(Data_pin, CLK_pin, MSBFIRST, *(buffer + i - 1)); digitalWrite(Latch_pin, HIGH); } // отправка бита в шину на опред вывод опред микросх void transferOut(byte adr, byte bit, bool data) { if (adr == 0 || adr > max_device)return; if (bit > 7)return; (data) ? *(buffer + adr - 1) |= (1UL << (bit)) : *(buffer + adr - 1) &= ~(1UL << (bit));// bitSet :bitClear digitalWrite(Latch_pin, LOW); for (int i = max_device; i > 0; i--) shiftOut(Data_pin, CLK_pin, MSBFIRST, *(buffer + i - 1)); digitalWrite(Latch_pin, HIGH); } // loop() void loop() { if (this->pnt != NULL) this->pnt->loop(); } }; //--------------------class Cl_74HC595------------------------ class Cl_74HC595 { Cl_wire_74HC595 *wire; byte adr; // адрес микросхемы в шине public: Cl_74HC595 *pnt = NULL; // конструктор (шина,позиция в шине 1..5) Cl_74HC595(Cl_wire_74HC595 *_wire, byte _adr) : wire(_wire), adr(_adr) {}; // setup() void setup() { if (this->pnt != NULL) this->pnt->setup(); wire->transferOut(adr, 0x00); } // loop() void loop() { if (this->pnt != NULL) this->pnt->loop(); } // запись байта void write(byte data) { wire->transferOut(adr, data); } }; //-----------------class Cl_sys--------------------------- class Cl_sys { Cl_wire_74HC595 * Start_W_74HC595 = NULL; // шина 74HC595 Cl_74HC595 * Start_74HC595 = NULL; // 74HC595 на шине public: Cl_sys() {}; void setup() { Start_W_74HC595 ->setup(); Start_74HC595 ->setup(); } void loop() { Start_W_74HC595 ->loop(); Start_74HC595 ->loop(); } void Plug(Cl_wire_74HC595 * W_74HC595) { // подключить шину из 74HC595 W_74HC595->pnt = Start_W_74HC595; Start_W_74HC595 = W_74HC595; } void Plug(Cl_74HC595 *_74HC595) { // подключить 74HC595 на шине _74HC595->pnt = Start_74HC595; Start_74HC595 = _74HC595; } }; //-------------------------------------------- //шинa74HC595 Latch=7,CLK=8,Data=12,device=3 Cl_wire_74HC595 Wire(7, 8, 12, 3); // подключить шину на выв 2 Cl_74HC595 _74HC595_U3(&Wire, 1); // подключить шину 74HC595_N1 адр=1 Cl_74HC595 _74HC595_U2(&Wire, 2); // подключить шину 74HC595_N2 адр=2 Cl_74HC595 _74HC595_U1(&Wire, 3); // подключить шину 74HC595_N2 адр=3 Cl_sys Sys; void setup() { Sys.Plug(&Wire); Sys.Plug(&_74HC595_U3); Sys.Plug(&_74HC595_U2); Sys.Plug(&_74HC595_U1); _74HC595_U1.write(0x00); //<------ _74HC595_U2.write(0x0F); //<------ меняй значения. Тогда значения на выв 74HC595 будут меняться _74HC595_U3.write(0xFF); //<------ Sys.setup(); } void loop() { Sys.loop(); }Не работает на выходах 74HC595 тишина
А у тебя протеус есть?
криво работает.вчера поставил.раньше не работал
А какой ставишь у меня восмой тоже не на всех компах идет. Я все на семерке он под любой вндой работает
Вот еще код. Посмотри
/*Cl_74HC595.ino */ //--------------------class Cl_wire_74HC595------------------------ class Cl_wire_74HC595 { byte Latch_pin; // вывод Latch byte CLK_pin; // вывод CLK byte Data_pin; // вывод Data byte max_device = 0; // количество 74HC595 в шине byte * buffer; public: Cl_wire_74HC595 *pnt = NULL; // коструктор Cl_wire_74HC595(byte Latch, byte CLK, byte Data, byte device) : Latch_pin(Latch), CLK_pin(CLK), Data_pin(Data), max_device(device) {}; // setup() void setup() { if (this->pnt != NULL) this->pnt->setup(); buffer = new byte[max_device]; pinMode(Latch_pin, OUTPUT); pinMode(CLK_pin, OUTPUT); pinMode(Data_pin, OUTPUT); for (int i = 0; i > max_device; i++) transferOut(i, 0x00); } // отправка байта в шину на опред микросх // adr 0,1,. data byte void transferOut(byte adr, byte data) { if (adr == 0 || adr > max_device)return; if (max_device == 0) return; *(buffer + adr) = data; digitalWrite(Latch_pin, LOW); for (int j = max_device - 1; j >= 0; j-- ) { for (int i = 7; i >= 0; i--) { digitalWrite(Data_pin, !!(*(buffer + j) & (1 << i))); digitalWrite(CLK_pin, HIGH); digitalWrite(CLK_pin, LOW); } } digitalWrite(Latch_pin, HIGH); } // отправка бита в шину на опред вывод опред микросх // adr 0,1,.. _bit 0,1,.. data 0,1 void transferOut(byte adr, byte _bit, bool data) { if (adr == 0 || adr > max_device)return; if (_bit > 7)return; if (max_device == 0) return; (data) ? *(buffer + adr) |= (1UL << _bit) : *(buffer + adr) &= ~(1UL << _bit);// bitSet :bitClear digitalWrite(Latch_pin, LOW); for (int j = max_device - 1; j >= 0; j-- ) { for (int i = 7; i >= 0; i--) { digitalWrite(Data_pin, !!(*(buffer + j) & (1UL << i))); digitalWrite(CLK_pin, HIGH); digitalWrite(CLK_pin, LOW); } } digitalWrite(Latch_pin, HIGH); } // loop() void loop() { if (this->pnt != NULL) this->pnt->loop(); } }; //--------------------class Cl_74HC595------------------------ class Cl_74HC595 { Cl_wire_74HC595 *wire; byte adr; // адрес микросхемы в шине public: Cl_74HC595 *pnt = NULL; // конструктор (шина,позиция в шине 1..5) Cl_74HC595(Cl_wire_74HC595 *_wire, byte _adr) : wire(_wire), adr(_adr) {}; // setup() void setup() { if (this->pnt != NULL) this->pnt->setup(); wire->transferOut(adr, 0x00); } // loop() void loop() { if (this->pnt != NULL) this->pnt->loop(); } // запись байта void write(byte data) { wire->transferOut(adr, data); } }; //-----------------class Cl_sys--------------------------- class Cl_sys { Cl_wire_74HC595 * Start_W_74HC595 = NULL; // шина 74HC595 Cl_74HC595 * Start_74HC595 = NULL; // 74HC595 на шине public: Cl_sys() {}; void setup() { Start_W_74HC595 ->setup(); Start_74HC595 ->setup(); } void loop() { Start_W_74HC595 ->loop(); Start_74HC595 ->loop(); } void Plug(Cl_wire_74HC595 * W_74HC595) { // подключить шину из 74HC595 W_74HC595->pnt = Start_W_74HC595; Start_W_74HC595 = W_74HC595; } void Plug(Cl_74HC595 *_74HC595) { // подключить 74HC595 на шине _74HC595->pnt = Start_74HC595; Start_74HC595 = _74HC595; } }; //-------------------------------------------- //шинa74HC595 Latch=7,CLK=8,Data=12,device=3 Cl_wire_74HC595 Wire(7, 8, 12, 3); // подключить шину на выв 2 Cl_74HC595 _74HC595_U3(&Wire, 0); // подключить шину 74HC595_N1 адр=0 Cl_74HC595 _74HC595_U2(&Wire, 1); // подключить шину 74HC595_N2 адр=1 Cl_74HC595 _74HC595_U1(&Wire, 2); // подключить шину 74HC595_N2 адр=2 Cl_sys Sys; void setup() { Sys.Plug(&Wire); Sys.Plug(&_74HC595_U3); Sys.Plug(&_74HC595_U2); Sys.Plug(&_74HC595_U1); Sys.setup(); } void loop() { static uint32_t past = 0; static byte a = 0x55; if (millis() - past > 300) { _74HC595_U1.write(a = ~a); _74HC595_U2.write(a); _74HC595_U3.write(a); } Sys.loop(); }qwone,
Спасибо за твою работу. Но опять без результатно светодиоды просто мегают в хаотичном порядке
Здесь они должны мигать в организованом порядке
/*Cl_74HC595.ino */ //--------------------class Cl_wire_74HC595------------------------ class Cl_wire_74HC595 { byte Latch_pin; // вывод Latch byte CLK_pin; // вывод CLK byte Data_pin; // вывод Data byte max_device = 0; // количество 74HC595 в шине byte * buffer;// использовать начиная buffer[1],buffer[2],.. public: Cl_wire_74HC595 *pnt = NULL; // коструктор Cl_wire_74HC595(byte Latch, byte CLK, byte Data, byte device) : Latch_pin(Latch), CLK_pin(CLK), Data_pin(Data), max_device(device) {}; // setup() void setup() { if (this->pnt != NULL) this->pnt->setup(); buffer = new byte[max_device + 1]; pinMode(Latch_pin, OUTPUT); pinMode(CLK_pin, OUTPUT); pinMode(Data_pin, OUTPUT); for (int i = 0; i > max_device; i++) transferOut(i, 0x00); } // отправка байта в шину на опред микросх // adr 1,2. data byte void transferOut(byte adr, byte data) { if (adr == 0 || adr > max_device)return; if (max_device == 0) return; buffer[adr] = data; digitalWrite(Latch_pin, LOW); for (int j = max_device ; j > 0; j-- ) { for (int i = 7; i >= 0; i--) { digitalWrite(Data_pin, !!(buffer[j] & (1UL << i))); digitalWrite(CLK_pin, HIGH); digitalWrite(CLK_pin, LOW); } } digitalWrite(Latch_pin, HIGH); } // отправка бита в шину на опред вывод опред микросх // adr 1,2,.. _bit 0,1,.. data 0,1 void transferOut(byte adr, byte _bit, bool data) { if (adr == 0 || adr > max_device)return; if (_bit > 7)return; if (max_device == 0) return; (data) ? buffer[adr] |= (1UL << _bit) : buffer[adr] &= ~(1UL << _bit);// bitSet :bitClear digitalWrite(Latch_pin, LOW); for (int j = max_device ; j > 0; j-- ) { for (int i = 7; i >= 0; i--) { digitalWrite(Data_pin, !!(buffer[j] & (1UL << i))); digitalWrite(CLK_pin, HIGH); digitalWrite(CLK_pin, LOW); } } digitalWrite(Latch_pin, HIGH); } // loop() void loop() { if (this->pnt != NULL) this->pnt->loop(); } }; //--------------------class Cl_74HC595------------------------ class Cl_74HC595 { Cl_wire_74HC595 *wire; byte adr; // адрес микросхемы в шине public: Cl_74HC595 *pnt = NULL; // конструктор (шина,позиция в шине 1..5) Cl_74HC595(Cl_wire_74HC595 *_wire, byte _adr) : wire(_wire), adr(_adr) {}; // setup() void setup() { if (this->pnt != NULL) this->pnt->setup(); wire->transferOut(adr, 0x00); } // loop() void loop() { if (this->pnt != NULL) this->pnt->loop(); } // запись байта void write(byte data) { wire->transferOut(adr, data); } }; //-----------------class Cl_sys--------------------------- class Cl_sys { Cl_wire_74HC595 * Start_W_74HC595 = NULL; // шина 74HC595 Cl_74HC595 * Start_74HC595 = NULL; // 74HC595 на шине public: Cl_sys() {}; void setup() { Start_W_74HC595 ->setup(); Start_74HC595 ->setup(); } void loop() { Start_W_74HC595 ->loop(); Start_74HC595 ->loop(); } void Plug(Cl_wire_74HC595 * W_74HC595) { // подключить шину из 74HC595 W_74HC595->pnt = Start_W_74HC595; Start_W_74HC595 = W_74HC595; } void Plug(Cl_74HC595 *_74HC595) { // подключить 74HC595 на шине _74HC595->pnt = Start_74HC595; Start_74HC595 = _74HC595; } }; //-------------------------------------------- //шинa74HC595 Latch=7,CLK=8,Data=12,device=3 Cl_wire_74HC595 Wire(7, 8, 12, 3); // подключить шину на выв 2 Cl_74HC595 _74HC595_U3(&Wire, 1); // подключить шину 74HC595_N1 адр=1 Cl_74HC595 _74HC595_U2(&Wire, 2); // подключить шину 74HC595_N2 адр=2 Cl_74HC595 _74HC595_U1(&Wire, 3); // подключить шину 74HC595_N2 адр=3 Cl_sys Sys; void setup() { Sys.Plug(&Wire); Sys.Plug(&_74HC595_U3); Sys.Plug(&_74HC595_U2); Sys.Plug(&_74HC595_U1); Sys.setup(); } void loop() { static uint32_t past = 0; static byte a = 0x55; if (millis() - past > 300) { // _74HC595_U1.write(a = ~a); // здесь организовано переключение _74HC595_U2.write(a); // светодиодов 0.3 вкл + 0.3 выкл _74HC595_U3.write(a); // } Sys.loop(); }Не хочу показаться назольевым но какойто бардак происходит не понятный. Не одна кнопка не активна просто мегание светодиодов и все
Не хочу показаться назольевым но какойто бардак происходит не понятный. Не одна кнопка не активна просто мегание светодиодов и все
Протеус глючный. Шим часто нехочет работать, заливаешь скетч в дуину - работает, в протеус-фиг
Вот написал код . Но управляются кнопками по заданому вами алгоритму только 4 светодиода (1 микросхема в каскаде выв D0,D1,D2,D3)
/*Cl_74HC595_v2.ino */ //--------------------class Cl_wire_74HC595------------------------ class Cl_wire_74HC595 { byte Latch_pin; // вывод Latch byte CLK_pin; // вывод CLK byte Data_pin; // вывод Data byte max_device = 0; // количество 74HC595 в шине byte * buffer;// использовать начиная buffer[1],buffer[2],.. public: Cl_wire_74HC595 *pnt = NULL; // коструктор Cl_wire_74HC595(byte Latch, byte CLK, byte Data, byte device) : Latch_pin(Latch), CLK_pin(CLK), Data_pin(Data), max_device(device) {}; // setup() void setup() { if (this->pnt != NULL) this->pnt->setup(); buffer = new byte[max_device + 1]; pinMode(Latch_pin, OUTPUT); pinMode(CLK_pin, OUTPUT); pinMode(Data_pin, OUTPUT); for (int i = 0; i > max_device; i++) transferOut(i, 0x00); } // отправка байта в шину на опред микросх // adr 1,2. data byte void transferOut(byte adr, byte data) { if (adr == 0 || adr > max_device)return; if (max_device == 0) return; buffer[adr] = data; digitalWrite(Latch_pin, LOW); for (int j = max_device ; j > 0; j-- ) { for (int i = 7; i >= 0; i--) { digitalWrite(Data_pin, !!(buffer[j] & (1UL << i))); digitalWrite(CLK_pin, HIGH); digitalWrite(CLK_pin, LOW); } } digitalWrite(Latch_pin, HIGH); } // отправка бита в шину на опред вывод опред микросх // adr 1,2,.. _bit 0,1,.. data 0,1 void transferOut(byte adr, byte _bit, bool data) { if (adr == 0 || adr > max_device)return; if (_bit > 7)return; if (max_device == 0) return; (data) ? buffer[adr] |= (1UL << _bit) : buffer[adr] &= ~(1UL << _bit);// bitSet :bitClear digitalWrite(Latch_pin, LOW); for (int j = max_device ; j > 0; j-- ) { for (int i = 7; i >= 0; i--) { digitalWrite(Data_pin, !!(buffer[j] & (1UL << i))); digitalWrite(CLK_pin, HIGH); digitalWrite(CLK_pin, LOW); } } digitalWrite(Latch_pin, HIGH); } // loop() void loop() { if (this->pnt != NULL) this->pnt->loop(); } }; //--------------------class Cl_Led_74HC595------------------------ class Cl_Led_74HC595 { Cl_wire_74HC595 *wire; byte adr; // адрес микросхемы в шине byte pos; // позиция в байте микросхемы public: Cl_Led_74HC595 *pnt = NULL; // конструктор (шина,позиция в шине 1..5,позиция в байте 0...7) Cl_Led_74HC595(Cl_wire_74HC595 *_wire, byte _adr, byte _pos) : wire(_wire), adr(_adr), pos(_pos) {} // setup() void setup() { if (this->pnt != NULL) this->pnt->setup(); wire->transferOut(adr, pos, LOW); } // loop() void loop() { if (this->pnt != NULL) this->pnt->loop(); } // запись байта void write(byte data) { wire->transferOut(adr, pos, data); } void ON() { wire->transferOut(adr, pos, HIGH); } void OFF() { wire->transferOut(adr, pos, LOW); } }; //--------------------class Cl_74HC595------------------------ class Cl_74HC595 { Cl_wire_74HC595 *wire; byte adr; // адрес микросхемы в шине public: Cl_74HC595 *pnt = NULL; // конструктор (шина,позиция в шине 1..5) Cl_74HC595(Cl_wire_74HC595 *_wire, byte _adr) : wire(_wire), adr(_adr) {}; // setup() void setup() { if (this->pnt != NULL) this->pnt->setup(); wire->transferOut(adr, 0x00); } // loop() void loop() { if (this->pnt != NULL) this->pnt->loop(); } // запись байта void write(byte data) { wire->transferOut(adr, data); } }; //----------------class Cl_Btn---------------------------- class Cl_Btn { byte pin ; // номер ноги на кнопке void (* Do1)(), (* Do2)(), (* Do3)(); bool btn, btn_old; bool bounce_btn = 0; // антидребезговый флаг uint32_t past = 0 ; uint32_t past1 = 0 ; const uint32_t time_1s = 1000 ; // задержка 1 сек const uint32_t time_2s = 2000 ; // задержка 2 сек public: // указатель на следующую Cl_Btn *pnt = NULL; // конструктор Cl_Btn(byte _pin, void (* _Do1)(), void (* _Do2)(), void (* _Do3)()) : pin(_pin), Do1(_Do1), Do2(_Do2), Do3(_Do3) {}; void setup() { if (this->pnt != NULL) this->pnt->setup(); pinMode(pin, INPUT_PULLUP);// подключить кнопку 1 с подтяжкой btn = digitalRead(pin); // прочитать реальное значение на выводе}; } void loop() { if (this->pnt != NULL) this->pnt->loop(); if (! bounce_btn && btn != digitalRead(pin)) { // если прошел фронт изм на выводн bounce_btn = 1; // выставить флаг past = millis(); // сделать временую засветку } else if ( bounce_btn && millis() - past >= 5 ) { // если прошло антидребезговое время bounce_btn = 0; // то снять флаг btn_old = btn ; btn = digitalRead(pin) ; // прочитать реальное значение на выводе if (btn_old && ! btn) past1 = millis(); if (!btn_old && btn) { uint32_t time = millis() - past1; if (time < time_1s) Do1(); else if (time < time_2s) Do2(); else Do3(); } } } }; //-----------------class Cl_sys--------------------------- class Cl_sys { Cl_wire_74HC595 * Start_W_74HC595 = NULL; // шина 74HC595 Cl_Led_74HC595 * Start_Led_74HC595 = NULL; // отдельные светодиоды на выводах 74HC595 на шине Cl_74HC595 * Start_74HC595 = NULL; // 74HC595 на шине Cl_Btn * Start_Btn = NULL; // кнопка на выводе public: Cl_sys() {}; void setup() { Start_W_74HC595 ->setup(); Start_Led_74HC595 ->setup(); Start_74HC595 ->setup(); Start_Btn ->setup(); } void loop() { Start_W_74HC595 ->loop(); Start_Led_74HC595 ->loop(); Start_74HC595 ->loop(); Start_Btn ->loop(); } void Plug(Cl_wire_74HC595 *obj) { // подключить шину из 74HC595 obj->pnt = Start_W_74HC595; Start_W_74HC595 = obj; } void Plug(Cl_Led_74HC595 *obj) { // подключить шину из 74HC595 obj->pnt = Start_Led_74HC595; Start_Led_74HC595 = obj; } void Plug(Cl_74HC595 *obj) { // подключить 74HC595 на шине obj->pnt = Start_74HC595; Start_74HC595 = obj; } void Plug(Cl_Btn *obj) { // подключить кнопку на вывод obj->pnt = Start_Btn; Start_Btn = obj; } }; //-------------------------------------------- //шинa74HC595 Latch=7,CLK=8,Data=12,device=3 Cl_wire_74HC595 Wire(7, 8, 12, 3); // подключить шину на выв 2 Cl_Led_74HC595 Led_U3_D0(&Wire, 1, 0); // подключить шину 74HC595_N3 адр=1 поз=1 Cl_Led_74HC595 Led_U3_D1(&Wire, 1, 1); // подключить шину 74HC595_N3 адр=1 поз=2 Cl_Led_74HC595 Led_U3_D2(&Wire, 1, 2); // подключить шину 74HC595_N3 адр=1 поз=3 Cl_Led_74HC595 Led_U3_D3(&Wire, 1, 3); // подключить шину 74HC595_N2 адр=1 поз=4 Cl_74HC595 _74HC595_U2(&Wire, 2); // подключить шину 74HC595_N2 адр=2 Cl_74HC595 _74HC595_U1(&Wire, 3); // подключить шину 74HC595_N2 адр=3 void Do1_Btn1() { // кратковременное нажатие кнопки static byte stat = 2; if (stat == 2) { stat = 0; Led_U3_D0.OFF(); Led_U3_D1.OFF(); } else ++stat; if (stat == 1) { Led_U3_D0.ON(); Led_U3_D1.OFF(); }; if (stat == 2) { Led_U3_D0.OFF(); Led_U3_D1.ON(); } } void Do2_Btn1() { // нажатие кнопки 1 сек static bool stat = 1; stat = !stat; if (stat == 0) { Led_U3_D2.ON(); } if (stat == 1) { Led_U3_D2.OFF(); } } void Do3_Btn1() { // нажатие кнопки 2 сек static bool stat = 1; stat = !stat; if (stat == 0) { Led_U3_D3.ON(); } if (stat == 1) { Led_U3_D3.OFF(); } } // создать кнопку с 3 обработчиками : нажатие < 1сек // 1сек <нажатие<2сек // 2сек <нажатие Cl_Btn Btn1(6 , Do1_Btn1, Do2_Btn1, Do3_Btn1);// подключить кнопку на выв 6 Cl_sys Sys; void setup() { Sys.Plug(&Wire); Sys.Plug(&Led_U3_D0); Sys.Plug(&Led_U3_D1); Sys.Plug(&Led_U3_D2); Sys.Plug(&Led_U3_D3); Sys.Plug(&_74HC595_U2); Sys.Plug(&_74HC595_U1); Sys.Plug(&Btn1); Sys.setup(); } void loop() { Sys.loop(); }спасибо большое да заработало. Я только поправел порты выхода на другую микросхему, а скрестить твой и мой код нельзя.
/*Cl_74HC595_v3.ino */ //--------------------class Cl_wire_74HC595------------------------ class Cl_wire_74HC595 { byte Latch_pin; // вывод Latch byte CLK_pin; // вывод CLK byte Data_pin; // вывод Data byte max_device = 0; // количество 74HC595 в шине byte * buffer;// использовать начиная buffer[1],buffer[2],.. public: Cl_wire_74HC595 *pnt = NULL; // коструктор Cl_wire_74HC595(byte Latch, byte CLK, byte Data, byte device) : Latch_pin(Latch), CLK_pin(CLK), Data_pin(Data), max_device(device) {}; // setup() void setup() { if (this->pnt != NULL) this->pnt->setup(); buffer = new byte[max_device + 1]; pinMode(Latch_pin, OUTPUT); pinMode(CLK_pin, OUTPUT); pinMode(Data_pin, OUTPUT); for (int i = 0; i > max_device; i++) transferOut(i, 0x00); } // отправка байта в шину на опред микросх // adr 1,2. data byte void transferOut(byte adr, byte data) { if (adr == 0 || adr > max_device)return; if (max_device == 0) return; buffer[adr] = data; digitalWrite(Latch_pin, LOW); for (int j = max_device ; j > 0; j-- ) { for (int i = 7; i >= 0; i--) { digitalWrite(Data_pin, !!(buffer[j] & (1UL << i))); digitalWrite(CLK_pin, HIGH); digitalWrite(CLK_pin, LOW); } } digitalWrite(Latch_pin, HIGH); } // отправка бита в шину на опред вывод опред микросх // adr 1,2,.. _bit 0,1,.. data 0,1 void transferOut(byte adr, byte _bit, bool data) { if (adr == 0 || adr > max_device)return; if (_bit > 7)return; if (max_device == 0) return; (data) ? buffer[adr] |= (1UL << _bit) : buffer[adr] &= ~(1UL << _bit);// bitSet :bitClear digitalWrite(Latch_pin, LOW); for (int j = max_device ; j > 0; j-- ) { for (int i = 7; i >= 0; i--) { digitalWrite(Data_pin, !!(buffer[j] & (1UL << i))); digitalWrite(CLK_pin, HIGH); digitalWrite(CLK_pin, LOW); } } digitalWrite(Latch_pin, HIGH); } // loop() void loop() { if (this->pnt != NULL) this->pnt->loop(); } }; //--------------------class Cl_Led_74HC595------------------------ class Cl_Led_74HC595 { Cl_wire_74HC595 *wire; byte adr; // адрес микросхемы в шине byte pos; // позиция в байте микросхемы public: Cl_Led_74HC595 *pnt = NULL; // конструктор (шина,позиция в шине 1..5,позиция в байте 0...7) Cl_Led_74HC595(Cl_wire_74HC595 *_wire, byte _adr, byte _pos) : wire(_wire), adr(_adr), pos(_pos) {} // setup() void setup() { if (this->pnt != NULL) this->pnt->setup(); wire->transferOut(adr, pos, LOW); } // loop() void loop() { if (this->pnt != NULL) this->pnt->loop(); } // запись байта void write(byte data) { wire->transferOut(adr, pos, data); } void ON() { wire->transferOut(adr, pos, HIGH); } void OFF() { wire->transferOut(adr, pos, LOW); } }; //--------------------class Cl_74HC595------------------------ class Cl_74HC595 { Cl_wire_74HC595 *wire; byte adr; // адрес микросхемы в шине public: Cl_74HC595 *pnt = NULL; // конструктор (шина,позиция в шине 1..5) Cl_74HC595(Cl_wire_74HC595 *_wire, byte _adr) : wire(_wire), adr(_adr) {}; // setup() void setup() { if (this->pnt != NULL) this->pnt->setup(); wire->transferOut(adr, 0x00); } // loop() void loop() { if (this->pnt != NULL) this->pnt->loop(); } // запись байта void write(byte data) { wire->transferOut(adr, data); } }; //----------------class Cl_Btn---------------------------- class Cl_Btn { byte pin ; // номер ноги на кнопке void (* Do1)(), (* Do2)(), (* Do3)(); bool btn, btn_old; bool bounce_btn = 0; // антидребезговый флаг uint32_t past = 0 ; uint32_t past1 = 0 ; const uint32_t time_1s = 1000 ; // задержка 1 сек const uint32_t time_2s = 2000 ; // задержка 2 сек public: // указатель на следующую Cl_Btn *pnt = NULL; // конструктор Cl_Btn(byte _pin, void (* _Do1)(), void (* _Do2)(), void (* _Do3)()) : pin(_pin), Do1(_Do1), Do2(_Do2), Do3(_Do3) {}; void setup() { if (this->pnt != NULL) this->pnt->setup(); pinMode(pin, INPUT_PULLUP);// подключить кнопку 1 с подтяжкой btn = digitalRead(pin); // прочитать реальное значение на выводе}; } void loop() { if (this->pnt != NULL) this->pnt->loop(); if (! bounce_btn && btn != digitalRead(pin)) { // если прошел фронт изм на выводн bounce_btn = 1; // выставить флаг past = millis(); // сделать временую засветку } else if ( bounce_btn && millis() - past >= 5 ) { // если прошло антидребезговое время bounce_btn = 0; // то снять флаг btn_old = btn ; btn = digitalRead(pin) ; // прочитать реальное значение на выводе if (btn_old && ! btn) past1 = millis(); if (!btn_old && btn) { uint32_t time = millis() - past1; if (time < time_1s) Do1(); else if (time < time_2s) Do2(); else Do3(); } } } }; //--------------------class Cl_Relay------------------------ class Cl_Relay { bool inv; // бит инверсии byte pin; // нога Ардуины public: Cl_Relay *pnt = NULL; // конструктор (нога,бит инверсии) Cl_Relay( byte _pin, bool _inv) : pin(_pin), inv(_inv) {} // setup() void setup() { if (this->pnt != NULL) this->pnt->setup(); pinMode(pin, OUTPUT); } // loop() void loop() { if (this->pnt != NULL) this->pnt->loop(); } // запись байта void write(bool data) { digitalWrite(pin, data ^ inv); } // включить реле void ON() { write(1); } // выключить реле void OFF() { write(0); } }; //--------------------class Cl_Analog_Sens------------------------ class Cl_Analog_Sens { byte pin; // номер ноги на сенсоре void (* Do)(); // указатель на обработчик сенсора public: Cl_Analog_Sens *pnt = NULL; int value;// величина на аналоговом датчике uint32_t past = 0; const uint32_t time = 1000; // опрос датчика идет раз в 1 сек Cl_Analog_Sens(byte pin, void (* _Do)()) {} // setup() void setup() { if (this->pnt != NULL) this->pnt->setup(); pinMode(pin, OUTPUT); value = analogRead(pin); } // loop() void loop() { if (this->pnt != NULL) this->pnt->loop(); if (millis() - past >= time) { past = millis(); value = analogRead(pin); } } }; //-----------------class Cl_sys--------------------------- class Cl_sys { Cl_wire_74HC595 * Start_W_74HC595 = NULL; // шина 74HC595 Cl_Led_74HC595 * Start_Led_74HC595 = NULL; // отдельные светодиоды на выводах 74HC595 на шине Cl_74HC595 * Start_74HC595 = NULL; // 74HC595 на шине Cl_Btn * Start_Btn = NULL; // кнопка на выводе Cl_Relay * Start_Relay = NULL; // реле на выводе Cl_Analog_Sens * Start_An_Sens = NULL; // аналоговый сенсор с обработчиком public: Cl_sys() {}; void setup() { Start_W_74HC595 ->setup(); Start_Led_74HC595 ->setup(); Start_74HC595 ->setup(); Start_Btn ->setup(); Start_Relay ->setup(); Start_An_Sens ->setup(); } void loop() { Start_W_74HC595 ->loop(); Start_Led_74HC595 ->loop(); Start_74HC595 ->loop(); Start_Btn ->loop(); Start_Relay ->loop(); Start_An_Sens ->loop(); } void Plug(Cl_wire_74HC595 *obj) { // подключить шину из 74HC595 obj->pnt = Start_W_74HC595; Start_W_74HC595 = obj; } void Plug(Cl_Led_74HC595 *obj) { // подключить шину из 74HC595 obj->pnt = Start_Led_74HC595; Start_Led_74HC595 = obj; } void Plug(Cl_74HC595 *obj) { // подключить 74HC595 на шине obj->pnt = Start_74HC595; Start_74HC595 = obj; } void Plug(Cl_Btn *obj) { // подключить кнопку на вывод obj->pnt = Start_Btn; Start_Btn = obj; } void Plug(Cl_Relay *obj) { // подключить реле на выход obj->pnt = Start_Relay; Start_Relay = obj; } void Plug(Cl_Analog_Sens *obj) { // подключить аналоговый сенсор с обработчиком obj->pnt = Start_An_Sens; Start_An_Sens = obj; } }; //-------------------------------------------- //шинa74HC595 Latch=7,CLK=8,Data=12,device=3 Cl_wire_74HC595 Wire(7, 8, 12, 3); // подключить шину на выв 2 Cl_Led_74HC595 Led_U3_D0(&Wire, 1, 0); // подключить шину 74HC595_N3 адр=1 поз=1 Cl_Led_74HC595 Led_U3_D1(&Wire, 1, 1); // подключить шину 74HC595_N3 адр=1 поз=2 Cl_Led_74HC595 Led_U3_D2(&Wire, 1, 2); // подключить шину 74HC595_N3 адр=1 поз=3 Cl_Led_74HC595 Led_U3_D3(&Wire, 1, 3); // подключить шину 74HC595_N2 адр=1 поз=4 Cl_74HC595 _74HC595_U2(&Wire, 2); // подключить шину 74HC595_N2 адр=2 Cl_74HC595 _74HC595_U1(&Wire, 3); // подключить шину 74HC595_N2 адр=3 void Do1_Btn1() { // кратковременное нажатие кнопки static byte stat = 2; if (stat == 2) { stat = 0; Led_U3_D0.OFF(); Led_U3_D1.OFF(); } else ++stat; if (stat == 1) { Led_U3_D0.ON(); Led_U3_D1.OFF(); } if (stat == 2) { Led_U3_D0.OFF(); Led_U3_D1.ON(); } } void Do2_Btn1() { // нажатие кнопки 1 сек static bool stat = 1; stat = !stat; if (stat == 0) { Led_U3_D2.ON(); } if (stat == 1) { Led_U3_D2.OFF(); } } void Do3_Btn1() { // нажатие кнопки 2 сек static bool stat = 1; stat = !stat; if (stat == 0) { Led_U3_D3.ON(); } if (stat == 1) { Led_U3_D3.OFF(); } } // создать кнопку с 3 обработчиками : нажатие < 1сек // 1сек <нажатие<2сек // 2сек <нажатие Cl_Btn Btn1(6 , Do1_Btn1, Do2_Btn1, Do3_Btn1);// подключить кнопку на выв 6 // создать реле на выходе Cl_Relay Relay_in_Home (17, 0); // salon Cl_Relay Relay_out_Home(16, 0); // ulica Cl_Relay Relay_Hot (15, 0); // gor Cl_Relay Relay_Cold (14, 0); // xol void Do_Water_Sens(); Cl_Analog_Sens Water_Sens(A7, Do_Water_Sens); // подключить аналоговый сенсор на выв A7 const byte Viev_map[] = {0x00, 0x01, 0x03, 0x07, 0x0F, 0x1F, 0x3F, 0x7F, 0xFF}; void Do_Water_Sens() { const int level_water = 512; Relay_Cold.OFF(); Relay_Hot.OFF(); if (Water_Sens.value < level_water)Relay_Cold.ON(); if (Water_Sens.value > level_water)Relay_Hot.ON(); _74HC595_U2.write(Viev_map[Water_Sens.value / 8] ); } void Do_Air_Sens(); Cl_Analog_Sens Air_Sens(A6, Do_Air_Sens); // подключить аналоговый сенсор на выв A7 void Do_Air_Sens() { const int level_air = 512; Relay_out_Home.OFF(); Relay_in_Home.OFF(); if (Air_Sens.value > level_air)Relay_out_Home.ON(); if (Air_Sens.value < level_air)Relay_in_Home.ON(); _74HC595_U1.write(Viev_map[Air_Sens.value / 8] ); } Cl_sys Sys; void setup() { Sys.Plug(&Wire); Sys.Plug(&Led_U3_D0); Sys.Plug(&Led_U3_D1); Sys.Plug(&Led_U3_D2); Sys.Plug(&Led_U3_D3); Sys.Plug(&_74HC595_U2); Sys.Plug(&_74HC595_U1); Sys.Plug(&Btn1); Sys.Plug(&Relay_in_Home ); Sys.Plug(&Relay_out_Home); Sys.Plug(&Relay_Hot ); Sys.Plug(&Relay_Cold ); Sys.Plug(&Water_Sens ); Sys.Plug(&Air_Sens ); Sys.setup(); } void loop() { Sys.loop(); }Скрестить код можно, но у вас навыков нет, а мне не имеет смысла. У меня же готовый конструктор по типа Лего. Собирай чего хочешь.
А где можно почитать про эти конструкторы
А где можно почитать про эти конструкторы
/*Cl_74HC595_v3.ino шина 74HC595 из соединеных каскадом <-- 7,8,12 (Latch,CLK,Data) 3 штуки 74HC595_U1 <-- шина 74HC595 (адр 3) 74HC595_U2 <-- шина 74HC595 (адр 2) Led_U3_D0 <-- шина 74HC595 (адр 1,поз 0) Led_U3_D1 <-- шина 74HC595 (адр 1,поз 1) Led_U3_D2 <-- шина 74HC595 (адр 1,поз 2) Led_U3_D3 <-- шина 74HC595 (адр 1,поз 3) кнопка Btn1 <-- 6 ардуино реле Relay_in_Home -->17 ардуино // salon реле Relay_out_Home -->16 ардуино // ulica реле Relay_Hot -->15 ардуино// gor реле Relay_Cold -->14 ардуино // xol аналог сенсор Air_Sens <-- A6 ардуино аналог сенсор Water_Sens <-- A7 ардуино */ //--------------------- настройки пользователя -------------------- const int level_water = 512 ;// порог переключения водяного сенсора const int level_air = 512 ;// порог переключения воздушного сенсора //--------------------class Cl_wire_74HC595------------------------ // класс шины из каскадного соединения нескольких 74HC595 class Cl_wire_74HC595 { byte Latch_pin; // вывод Latch byte CLK_pin; // вывод CLK byte Data_pin; // вывод Data byte max_device = 0; // количество 74HC595 в шине byte * buffer;// использовать начиная buffer[1],buffer[2],.. public: Cl_wire_74HC595 *pnt = NULL; // коструктор Cl_wire_74HC595(byte Latch, byte CLK, byte Data, byte device) : Latch_pin(Latch), CLK_pin(CLK), Data_pin(Data), max_device(device) {}; // setup() void setup() { if (this->pnt != NULL) this->pnt->setup(); buffer = new byte[max_device + 1]; pinMode(Latch_pin, OUTPUT); pinMode(CLK_pin, OUTPUT); pinMode(Data_pin, OUTPUT); for (int i = 0; i > max_device; i++) transferOut(i, 0x00); } // отправка байта в шину на опред микросх // adr 1,2. data byte void transferOut(byte adr, byte data) { if (adr == 0 || adr > max_device)return; if (max_device == 0) return; buffer[adr] = data; digitalWrite(Latch_pin, LOW); for (int j = max_device ; j > 0; j-- ) { for (int i = 7; i >= 0; i--) { digitalWrite(Data_pin, !!(buffer[j] & (1UL << i))); digitalWrite(CLK_pin, HIGH); digitalWrite(CLK_pin, LOW); } } digitalWrite(Latch_pin, HIGH); } // отправка бита в шину на опред вывод опред микросх // adr 1,2,.. _bit 0,1,.. data 0,1 void transferOut(byte adr, byte _bit, bool data) { if (adr == 0 || adr > max_device)return; if (_bit > 7)return; if (max_device == 0) return; (data) ? buffer[adr] |= (1UL << _bit) : buffer[adr] &= ~(1UL << _bit);// bitSet :bitClear digitalWrite(Latch_pin, LOW); for (int j = max_device ; j > 0; j-- ) { for (int i = 7; i >= 0; i--) { digitalWrite(Data_pin, !!(buffer[j] & (1UL << i))); digitalWrite(CLK_pin, HIGH); digitalWrite(CLK_pin, LOW); } } digitalWrite(Latch_pin, HIGH); } // loop() void loop() { if (this->pnt != NULL) this->pnt->loop(); } }; //--------------------class Cl_Led_74HC595------------------------ // класс светодиода на выводе одной из 74HC595 соединенных каскадом class Cl_Led_74HC595 { Cl_wire_74HC595 *wire; byte adr; // адрес микросхемы в шине byte pos; // позиция в байте микросхемы public: Cl_Led_74HC595 *pnt = NULL; // конструктор (шина,позиция в шине 1..5,позиция в байте 0...7) Cl_Led_74HC595(Cl_wire_74HC595 *_wire, byte _adr, byte _pos) : wire(_wire), adr(_adr), pos(_pos) {} // setup() void setup() { if (this->pnt != NULL) this->pnt->setup(); wire->transferOut(adr, pos, LOW); } // loop() void loop() { if (this->pnt != NULL) this->pnt->loop(); } // запись байта void write(byte data) { wire->transferOut(adr, pos, data); } void ON() { wire->transferOut(adr, pos, HIGH); } void OFF() { wire->transferOut(adr, pos, LOW); } }; //--------------------class Cl_74HC595------------------------ // класс одной из 74HC595 соединенных каскадом class Cl_74HC595 { Cl_wire_74HC595 *wire; byte adr; // адрес микросхемы в шине public: Cl_74HC595 *pnt = NULL; // конструктор (шина,позиция в шине 1..5) Cl_74HC595(Cl_wire_74HC595 *_wire, byte _adr) : wire(_wire), adr(_adr) {}; // setup() void setup() { if (this->pnt != NULL) this->pnt->setup(); wire->transferOut(adr, 0x00); } // loop() void loop() { if (this->pnt != NULL) this->pnt->loop(); } // запись байта void write(byte data) { wire->transferOut(adr, data); } }; //----------------class Cl_Btn_3---------------------------- // класс кнопки с 3 обработкиками : короткое нажатие(меньше 1 сек),среднее нажатие(1-2 сек),длиное нажатие(больше 2 сек) class Cl_Btn_3 { byte pin ; // номер ноги на кнопке void (* Do1)(), (* Do2)(), (* Do3)(); bool btn, btn_old; bool bounce_btn = 0; // антидребезговый флаг uint32_t past = 0 ; uint32_t past1 = 0 ; const uint32_t time_1s = 1000 ; // задержка 1 сек const uint32_t time_2s = 2000 ; // задержка 2 сек public: // указатель на следующую Cl_Btn_3 *pnt = NULL; // конструктор Cl_Btn_3(byte _pin, void (* _Do1)(), void (* _Do2)(), void (* _Do3)()) : pin(_pin), Do1(_Do1), Do2(_Do2), Do3(_Do3) {}; void setup() { if (this->pnt != NULL) this->pnt->setup(); pinMode(pin, INPUT_PULLUP);// подключить кнопку 1 с подтяжкой btn = digitalRead(pin); // прочитать реальное значение на выводе}; } void loop() { if (this->pnt != NULL) this->pnt->loop(); if (! bounce_btn && btn != digitalRead(pin)) { // если прошел фронт изм на выводн bounce_btn = 1; // выставить флаг past = millis(); // сделать временую засветку } else if ( bounce_btn && millis() - past >= 5 ) { // если прошло антидребезговое время bounce_btn = 0; // то снять флаг btn_old = btn ; btn = digitalRead(pin) ; // прочитать реальное значение на выводе if (btn_old && ! btn) past1 = millis(); if (!btn_old && btn) { uint32_t time = millis() - past1; if (time < time_1s) Do1(); else if (time < time_2s) Do2(); else Do3(); } } } }; //--------------------class Cl_Relay------------------------ // класс реле подключеных нв вывод ардуины class Cl_Relay { bool inv; // бит инверсии byte pin; // нога Ардуины public: Cl_Relay *pnt = NULL; // конструктор (нога,бит инверсии) Cl_Relay( byte _pin, bool _inv) : pin(_pin), inv(_inv) {} // setup() void setup() { if (this->pnt != NULL) this->pnt->setup(); pinMode(pin, OUTPUT); } // loop() void loop() { if (this->pnt != NULL) this->pnt->loop(); } // запись байта void write(bool data) { digitalWrite(pin, data ^ inv); } // включить реле void ON() { write(1); } // выключить реле void OFF() { write(0); } }; //--------------------class Cl_Analog_Sens------------------------ // класс аналогового сенсора повешанного на аналогов вывод Ардуины // с обработчиком вызываемых каждую секунду class Cl_Analog_Sens { byte pin; // номер ноги на сенсоре void (* Do)(); // указатель на обработчик сенсора public: Cl_Analog_Sens *pnt = NULL; int value;// величина на аналоговом датчике uint32_t past = 0; const uint32_t time = 1000; // опрос датчика идет раз в 1 сек Cl_Analog_Sens(byte pin, void (* _Do)()) {} // setup() void setup() { if (this->pnt != NULL) this->pnt->setup(); pinMode(pin, OUTPUT); value = analogRead(pin); } // loop() void loop() { if (this->pnt != NULL) this->pnt->loop(); if (millis() - past >= time) { past = millis(); value = analogRead(pin); } } }; //-----------------class Cl_sys--------------------------- // класс собирающий объекты разных классов в единую систему class Cl_sys { Cl_wire_74HC595 * Start_W_74HC595 = NULL; // шина 74HC595 Cl_Led_74HC595 * Start_Led_74HC595 = NULL; // отдельные светодиоды на выводах 74HC595 на шине Cl_74HC595 * Start_74HC595 = NULL; // 74HC595 на шине Cl_Btn_3 * Start_Btn_3 = NULL; // кнопка на выводе Cl_Relay * Start_Relay = NULL; // реле на выводе Cl_Analog_Sens * Start_An_Sens = NULL; // аналоговый сенсор с обработчиком public: Cl_sys() {}; void setup() { Start_W_74HC595 ->setup(); Start_Led_74HC595 ->setup(); Start_74HC595 ->setup(); Start_Btn_3 ->setup(); Start_Relay ->setup(); Start_An_Sens ->setup(); } void loop() { Start_W_74HC595 ->loop(); Start_Led_74HC595 ->loop(); Start_74HC595 ->loop(); Start_Btn_3 ->loop(); Start_Relay ->loop(); Start_An_Sens ->loop(); } void Plug(Cl_wire_74HC595 *obj) { // подключить шину из 74HC595 obj->pnt = Start_W_74HC595; Start_W_74HC595 = obj; } void Plug(Cl_Led_74HC595 *obj) { // подключить шину из 74HC595 obj->pnt = Start_Led_74HC595; Start_Led_74HC595 = obj; } void Plug(Cl_74HC595 *obj) { // подключить 74HC595 на шине obj->pnt = Start_74HC595; Start_74HC595 = obj; } void Plug(Cl_Btn_3 *obj) { // подключить кнопку на вывод obj->pnt = Start_Btn_3; Start_Btn_3 = obj; } void Plug(Cl_Relay *obj) { // подключить реле на выход obj->pnt = Start_Relay; Start_Relay = obj; } void Plug(Cl_Analog_Sens *obj) { // подключить аналоговый сенсор с обработчиком obj->pnt = Start_An_Sens; Start_An_Sens = obj; } }; //-------------------------------------------- // раздел для создания объектов по классам //шинa74HC595 Latch=7,CLK=8,Data=12,device=3 Cl_wire_74HC595 Wire(7, 8, 12, 3); // подключить шину на выв 2 Cl_Led_74HC595 Led_U3_D0(&Wire, 1, 0); // подключить шину 74HC595_N3 адр=1 поз=1 Cl_Led_74HC595 Led_U3_D1(&Wire, 1, 1); // подключить шину 74HC595_N3 адр=1 поз=2 Cl_Led_74HC595 Led_U3_D2(&Wire, 1, 2); // подключить шину 74HC595_N3 адр=1 поз=3 Cl_Led_74HC595 Led_U3_D3(&Wire, 1, 3); // подключить шину 74HC595_N2 адр=1 поз=4 Cl_74HC595 _74HC595_U2(&Wire, 2); // подключить шину 74HC595_N2 адр=2 Cl_74HC595 _74HC595_U1(&Wire, 3); // подключить шину 74HC595_N2 адр=3 void Do1_Btn1() { // кратковременное нажатие кнопки static byte stat = 2; if (stat == 2) { stat = 0; Led_U3_D0.OFF(); Led_U3_D1.OFF(); } else ++stat; if (stat == 1) { Led_U3_D0.ON(); Led_U3_D1.OFF(); } if (stat == 2) { Led_U3_D0.OFF(); Led_U3_D1.ON(); } } void Do2_Btn1() { // нажатие кнопки 1 сек static bool stat = 1; stat = !stat; if (stat == 0) { Led_U3_D2.ON(); } if (stat == 1) { Led_U3_D2.OFF(); } } void Do3_Btn1() { // нажатие кнопки 2 сек static bool stat = 1; stat = !stat; if (stat == 0) { Led_U3_D3.ON(); } if (stat == 1) { Led_U3_D3.OFF(); } } // создать кнопку с 3 обработчиками : нажатие < 1сек // 1сек <нажатие<2сек // 2сек <нажатие Cl_Btn_3 Btn1(6, Do1_Btn1, Do2_Btn1, Do3_Btn1);// подключить кнопку на выв 6 // создать реле на выходе Cl_Relay Relay_in_Home (17, 0); // salon Cl_Relay Relay_out_Home(16, 0); // ulica Cl_Relay Relay_Hot (15, 0); // gor Cl_Relay Relay_Cold (14, 0); // xol void Do_Water_Sens(); Cl_Analog_Sens Water_Sens(A7, Do_Water_Sens); // подключить аналоговый сенсор на выв A7 const byte Viev_map[] = {0x00, 0x01, 0x03, 0x07, 0x0F, 0x1F, 0x3F, 0x7F, 0xFF}; void Do_Water_Sens() { Relay_Cold.OFF(); Relay_Hot.OFF(); if (Water_Sens.value < level_water)Relay_Cold.ON(); if (Water_Sens.value > level_water)Relay_Hot.ON(); _74HC595_U2.write(Viev_map[Water_Sens.value / 8] ); } void Do_Air_Sens(); Cl_Analog_Sens Air_Sens(A6, Do_Air_Sens); // подключить аналоговый сенсор на выв A7 void Do_Air_Sens() { Relay_out_Home.OFF(); Relay_in_Home.OFF(); if (Air_Sens.value > level_air)Relay_out_Home.ON(); if (Air_Sens.value < level_air)Relay_in_Home.ON(); _74HC595_U1.write(Viev_map[Air_Sens.value / 8] ); } Cl_sys Sys; void setup() { //-раздел для функций подключения элементов Sys.Plug(&Wire); Sys.Plug(&Led_U3_D0); Sys.Plug(&Led_U3_D1); Sys.Plug(&Led_U3_D2); Sys.Plug(&Led_U3_D3); Sys.Plug(&_74HC595_U2); Sys.Plug(&_74HC595_U1); Sys.Plug(&Btn1); Sys.Plug(&Relay_in_Home ); Sys.Plug(&Relay_out_Home); Sys.Plug(&Relay_Hot ); Sys.Plug(&Relay_Cold ); Sys.Plug(&Water_Sens ); Sys.Plug(&Air_Sens ); Sys.setup(); } void loop() { Sys.loop(); }Спасибо. Постораюсь вникнуть. Если тебя не затруднит дошии код под всю схему.
Зарание огромное спасибо.
Просто пока лето хочеться закончить эпопею с печкой.