SPI Slave в Master и обратно
- Войдите на сайт для отправки комментариев
Пт, 03/08/2018 - 15:00
Всем бобра!
Столкнулся с задачей , в которой, кхе-кхе, как бы опыта маловато, т.к. с SPI работал мало, да все на уровне библиотек. Тут надо копнуть глубже, референс мануал почитал, вроде понятно, но меня подводные камни настигают всегда и везде, поэтому буду благодарен за советы.
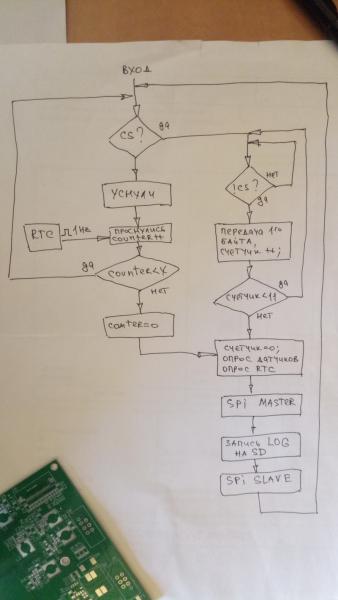
Итак, есть устройство на Atmega328P которое работает эдаким логгером и прашивателем датчиков. По шине SPI он подключен к главному контроллеру, и как истинный SLAVE, шлет ему инфу по состоянию датчиков , а именно 12 байт, по запросу, который должен приходить раз в секунду. В этом режиме запрос от главного контроллера синхронизирует весь алгоритм. Отправив 12 байт, утройство опрашивает датчики, и, переключив SPI в мастер, пишет лог на карту памяти. Затем опять переключается в слейв, и ждет следующего запроса.
Главный контроллер может выключиться. В этом случае данное устройство должно анализировать состояние CS, и если оно нулевое - уходить в сон. Просыпается оно от внешнего прерывания от RTC раз в секунду, инкреминирует counter, и если counter меньше значения X - опять засыпает.
Скажем, раз в пять минут, в зависимости от значения Х, устройство просыпается, опрашивает датчики и RTC, пишет лог, и опят засыпает, и так до тех пор, пока CS на шине SPI опять не станет единицей.
Рисунок алгоритма прикладываю. Собственно хочу спросить у людей опытных, какие недостатки такого алгоритма, и какие камни меня могут по этому поводу ожидать.
Глум , подколки - приветствуются, флуд - не очень. :)
Насколько я понимаю, переключение мастер-слейв должно выглядеть где-то так(пока без спящего режима):
#include<SPI.h> #include<SD.h> #define THRESHOLD 300 File file; struct { uint32_t param1; uint32_t param2; uint32_t param3; }data; void setup(){ init_SPI_slave(); } void init_SPI_slave(){ DDRB |= (1<<PORTB4);// MISO на выход PORTB &= ~(1<<PORTB4); //низкий уровень DDRB &=~((1<<PORTB2)|(1<<PORTB3)|(1<<PORTB5));// CS, MOSI, SCK - входы SPCR=0b01000000; // только enable } void loop(){ if(PINB<<2)sendData();// если главный контроллер включен(CS поднята) else; // спим до момента опроса датчиков //опрашиваем датчики // меняем содержимое data writeLOG(); } void writeLOG(){ //настраиваем SPI как мастер DDRB |= ((1<<PORTB2)|(1<<PORTB3)|(1<<PORTB5)); //ножки SPI на выход DDRB &= ~(1<<PORTB4);// MISO на вход PORTB &= ~((1<<PORTB2)|(1<<PORTB3)|(1<<PORTB5)); //низкий уровень SPCR = 0b01010000;// enable + master // тут пишем лог пользуясь SD.h init_SPI_slave();//вазвращаем настройки на слейв } void sendData(){ byte * ptrData = (byte*)(&data); uint8_t counter = 0; while(counter<sizeof(data)){ SPDR = *(ptrData+counter);//вносим байт в регистр данных while(!(SPSR & (1<<SPIF)));//ждем пока байт передастся } }5N62V, попробую на пальцах объянить какую хрень вы несете. Есть человек. Он потерял руку. Ему сделали протез.И ладно подключили управления напрямую к нервам. Заебись. Теперь находится чувак и говорит. Как отключить человека, что бы протез за человека ел,спал, работал ну и так далее. Идиотизм. Так и у Вас. SPI всегда мастер, пототому что там только мастер может тактировать передачу. Теперь возвращаюсь к инвалиду. Вот в протезе сделали будильник. Но стартует передача мастером. Как передать сигналы будильника. Звуком, светом. В общем для этого организована банальная система прерываний. "Слыш барин,почта пожаловала" и чел лезет смотреть СМС. И человека не надо отключать что бы мобильник напрямую СМС отправил в голову человека.
5N62V, попробую на пальцах объянить какую хрень вы несете. Есть человек. Он потерял руку. Ему сделали протез.И ладно подключили управления напрямую к нервам. Заебись. Теперь находится чувак и говорит. Как отключить человека, что бы протез за человека ел,спал, работал ну и так далее. Идиотизм. Так и у Вас. SPI всегда мастер, пототому что там только мастер может тактировать передачу. Теперь возвращаюсь к инвалиду. Вот в протезе сделали будильник. Но стартует передача мастером. Как передать сигналы будильника. Звуком, светом. В общем для этого организована банальная система прерываний. "Слыш барин,почта пожаловала" и чел лезет смотреть СМС. И человека не надо отключать что бы мобильник напрямую СМС отправил в голову человека.
Ёмко. Где то так...
5N62V, попробую на пальцах объянить какую хрень вы несете. Есть человек. Он потерял руку. Ему сделали протез.И ладно подключили управления напрямую к нервам. Заебись. Теперь находится чувак и говорит. Как отключить человека, что бы протез за человека ел,спал, работал ну и так далее. Идиотизм. Так и у Вас. SPI всегда мастер, пототому что там только мастер может тактировать передачу. Теперь возвращаюсь к инвалиду. Вот в протезе сделали будильник. Но стартует передача мастером. Как передать сигналы будильника. Звуком, светом. В общем для этого организована банальная система прерываний. "Слыш барин,почта пожаловала" и чел лезет смотреть СМС. И человека не надо отключать что бы мобильник напрямую СМС отправил в голову человека.
Но похоже такой фичи в SPI нет изначально.
Или просто инициализацию шины задизэйблить.
А в чем проблема? Работает - в проекты, не работает - так спросите что не работает софт или хард.
И скажите про скорость опроса портов.
А в чем проблема? Работает - в проекты, не работает - так спросите что не работает софт или хард.
просто я такой реализации нигде не видел, а сделать надо. Вот и спрашиваю советов. Одна подсказка уже есть.
И скажите про скорость опроса портов.
Вопрос не понял.
А вдруг ардуинка не сможет работать на этой скорости. И Вам придется переходить на другой чип...
А вдруг ардуинка не сможет работать на этой скорости. И Вам придется переходить на другой чип...
В протеусе соорудите проект, а затем выкладывайте.
Чтоб у меня все гладко прошло - да ни в жизть! :)
Не то, чтоб совсем не работает моя задумка, не как-то хреново. Уж лучше бы и вовсе не работала.
Вобщем сам код рабочий, проработал много недель. Логгер писал все как надо. Луп вращается ровно раз в секунду, опрашивает все как надо, и в конце вызывает функцию записи лога на карту SD , использую библиотеку SD.h
Теперь прикрутил инициализацию SPI как слейва, но при приходе в функцию записи лога шина переинициализируется процом как мастер, пишет лог, и опять в слейв. Пока что никакого обмена с внешним устройством, просто решил проверить как будет вести себя шина. Все работает ровно 304 шага, на 305м перестается видеться файл, и - привет семье. Файлики записываются равные, по 14 848 байт каждый.
Беру и записываю return; прямо вначале инициализации слейва - все работает как надо. Убераю ретурн - 304 шага работает, дальше - нет. Я в печали. :( почему именно 304 шага? перестает срабатывать строчка
file = SD.open("log.csv", FILE_WRITE);
Самое гадкое: не пойму куда кидаться. Флешку форматировал, контакты протирал. :)
Я понимаю, что задача специфичная, но может у кого проскочит светлая мысля!
фукнции инициализации:
void init_SPI_slave(){ //return; DDRB |= (1<<PORTB4);// MISO на выход PORTB &= ~(1<<PORTB4); //низкий уровень DDRB &=~((1<<PORTB2)|(1<<PORTB3)|(1<<PORTB5));// CS, MOSI, SCK - входы SPCR = 0; SPCR=0b01000000; // только enable } void init_SPI_master(){ DDRB |= ((1<<PORTB2)|(1<<PORTB3)|(1<<PORTB5)); //ножки SPI на выход //DDRB |= ((1<<PORTB3)|(1<<PORTB5)); DDRB &= ~(1<<PORTB4);// MISO на вход PORTB &= ~((1<<PORTB2)|(1<<PORTB3)|(1<<PORTB5)); //низкий уровень SPCR = 0; SPCR = 0b01010001;// enable + master }Функция записи лога:
void write_log(uint32_t t) { init_SPI_master(); file = SD.open("log.csv", FILE_WRITE); if (file) { file.print(day); file.print(","); file.print(month); file.print(","); file.print(year); file.print(","); file.print(hour); file.print(","); file.print(min); file.print(","); file.print(sec); file.print(","); file.print((float)data.voltage / 1000, 3); file.print(","); file.print((float)data.discharge / 1000, 3); file.print(","); file.print(data.capacity); file.print(","); file.print((float)t / 1000, 1); file.print(","); long temp; EEPROM.get(INITIAL_CAPACITY_ADDR,temp); file.print((int32_t)(((int64_t)data.capacity * 100) / temp)); file.print(","); file.println(power); file.close(); } else { Serial.println("NO FILE");} init_SPI_slave(); }Так вот по теме. Что такое Мастер-слейвы. Это структура провереная жизнью. Начальник и куча подчиненых. Тогда всегда можно упорядочить работу. Но если куча начальников, то в работе начинается жопа. Но для чего нужен начальник? Для проведения своих идей и указаний до подчиненых. Тоже не верно. 1- начальник обязан отсекать все не нужные разговоры не по теме, не по текущей теме. 2- начальник должен позволять подчиненым высказаться, опять же по теме. 3- из этой суммы высказываний сделать выводы и передать что каждый должен подчиненый делать дальше. Если начальники регулярно меняются, то теперь уже подчиненые дисорганизуются. Недавно предыдущему начальнику высказывал, а пришел новый и с ново здорово.
ПС: Если Вас коробит "диктат начальника", то сделайте его "сервером почтовых сообщений друг другу". Если одному подчиненому надо передать сообщение другому подчиненому, то заходит к начальнику и оставляет письмо . И теперь начальник должен заморочится, что бы письмо дошло до адресата. Как это не похоже на человеческую организацию. Но в мире сетей все так и проиходит.
Пух, мне Вашего уровня абстрактности не достичь, видимо, никогда.
Тут как бы не структура нашальник - куча подчиненных, а начальник-бригадир-рабочий. Вот бригадир-то и является подчиненным для своего начальника, и начальником для рабочего. А начальник бригадира и рабочий непосредственно не общаются, хотя и сидят а одной шине тактирования.
Ну здесь вы глюканули. линии начальник-бригадир и бригадир-подчиненые это абсолютно разные линии. В первой мастер начальник, во второй бригадир. И строить их надо по разному. Классический SPI нужен для общения с устройствами у которых вообще нет мозгов, только один регистр. Пин CS у них за адрес устроства. Просто да. Но для мозговитых устроств классический SPI очень не удобен. Так как CS от мастера активного устройства надо сразу заводить на прерывание слейва активного устройства. А так же от слейва к мастеру надо вести пин обратку REALY. И все потому что если подан сигнал прерывания, то слейв будет в процедуре обработчике этого прерывания. И надо ждать что бы слейв указал что он готов принять сигнал. Да и принимать будет программно, так как в АВР нет пассивного SPI. Только актив.
ПС: лучше бы у вас начальник бригадир общались по Serial. гемора было бы поменьше.
ПС: лучше бы у вас начальник бригадир общались по Serial. гемора было бы поменьше.
Ну здесь вы глюканули. линии начальник-бригадир и бригадир-подчиненые это абсолютно разные линии.
Скажете так не работает? отчасти будете правы, ибо после 304ого шага не работает, но до 304ого-то работает! Так что пока мы оба правы. Вот только делать не знаю чего. Полезу наверное изучать команды управления SD картой, и буду врукопашную с картой общаться, чтоб понять что ей не так. А то в этой библиотеке черт ногу сломит!