Понятно, что 30А - максимальный, я думаю не более 10А будет жрать каждый привод, плюс ко всему работать они будут исключительно последовательно (то есть одновременно оба никогда не будут вращаться).
Так какой и этих вариантов советуете? второй? или от pololu?
Так они же одинаковые, точнее драйвера у них одинаковые, тут дело вкуса, хотите сами контролировать ШИМ берите второй, не хотите или МК и так будет сильно загружен берите первый - у него свой контроллер имеется, который сам ШИМ генерит, отправили в него команду и он сам по себе работает.
Говорю же драйвера у них одинаковые, и не оборотами, а током (при разных нагрузках на валу - обороты разные).
Первый работает по UARTу, то есть всего 2 вывода - RX и TX, а точнее даже один - TX.
Второй просто драйвер, он займет выводы D4, D5, D6, D7, D8, D9, и А0, А1, А2, А3.
На 17 странице самый первый обзац: For example, if we want to set motor M1 to full speed forward using the compact protocol, we could send the following byte sequence: in hex: 0x8D, 0x7F in decimal: 141, 127
что переводжится как: Например, если мы хотим запустить двигатель M1 на полной скорости вперед с помощью компактного протокола, мы могли бы написать следующую последовательность байт: в шестнадцатеричной: 0x8D, 0x7F в десятичной: 141, 127
Пришел Pololu, подключил, долго разбирался, на Меге его подключил к D10, D11 тогда заработал.
Возникла другая проблема, подключил VIN (выпрямитель для зарядки АКБ) 12В, при включении Pololu напряжение поднимается до 18В, это опасно, так как максимальное напряжение 16В.
Плохая идея. Скорее всего это "источник стабилизированный по току" (они реже попадаются и стоят дороже). То есть он старается обеспечить постоянный ток. Путем "задираем напряжение".
А вам нужно "обычный". У которого "стабилизированный по напряжению".
Вообщем IMHO вы просто блок питания не удачно выбрали.
Попробовал блок питания от старого компа, он оказывается по +12В до 8А держит - все работает, только напруга садится до +6,5В, но это ничего Pololu до +6В работоспособен.
Жаль конечно что все пришлось делать самому на форуме так никто дельного совета не дал.
Но есть и приятная сторона! Мой друг Рома "master-uri" На данную схему сделал разводку платы и любезно предоставил мне ее для изготовления. Мой первый опыт изготовления плат с помощью лазерного принтера и утюга оказался успешным. Плата заработала как и было запланировано. Без каких либо сбоев. фото выкладываю.
Здравствуйте, подскажите пожалуйста, не осталось ли у вас еще схемы печатной платы данного ШИМ регулятора? Очень нужно управлять коллекторным двигателем постоянного тока 12в 4А с помощью обычной Ардуино
Добрый день, попался мне в руки мотоцикл детсткий на аккумуляторе, он без РУ, но захотелось доработать. Очень понравилась ваша схема управления мотором, которая на MOSFET-ах. Попробовал ее повторить, нарисовал плату, все спаял, оно даже заработало, но как-то странно - в одну сторону мотор едет, скорость регулируется, все отлично, но как только на ногу управления направлением вращения подается логическая 1, то лабораторный БП показывает КЗ и мотор уже не крутится. Что самое интересное - на большой скважности(минимальная скорость) вращение мотора есть, то при повышении - останавливается. Вопрос - куда "копать". Может надо как-то "инвертировать" сигралы ШИМ? Просто на схеме не совсем понятно что и куда цеплять, я прицепил одну ногу ШИМ к D3, другую DIR к D12, ну и земля. Если не сложно, намекните куда рыть?
Да много разных схем есть пишите на мыло Sermaster24@gmail.com отвечу с удовольствием подскажу все что знаю.
Думаю тоже собрать себе на полевиках драйвер ,а то что выше китай читаю по отзывам то 1 канал не работает ,то брак . Поэтому хотелось бы увидеть ваши наработки или схемы которые вы нашли с нагрузкой до 15 ампер .
Да, с того времени как писал этот пост. Много времени прошло. Многое с полевиками стало понятнее. Важно не допускать сквозных токов при открытии и закрытии, если управляем без спец драйвера. Пишите в почту, свяжемся голосом далее расскажу подробности на волнующие вопросы, сейчас просто много работы не успеваю посещать часто форум.
Да я смотрю она на 30А
А готовая схема есть? раз есть ПП
Знать бы еще на какое мыло писать!
А это устройство подойдет:
http://www.pololu.com/docs/pdf/0J29/qik_2s12v10.pdf
http://www.pololu.com/catalog/product/1112
Или это:
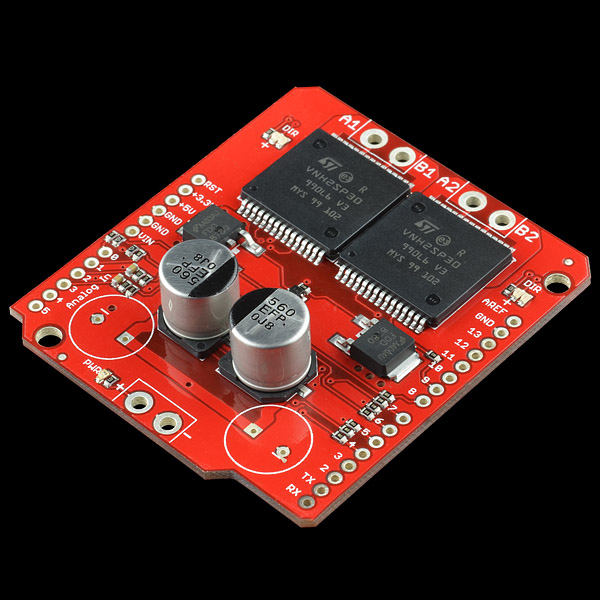
https://www.sparkfun.com/products/10182
так что, брать?
последнее как раз чтобы самому не паять а запас по току никогда не мешает
Да я смотрю она на 30А
Вы должны понимать, что это кратковременный ток, а не рабочий, рабочий заявлен 14 ампер.
Понятно, что 30А - максимальный, я думаю не более 10А будет жрать каждый привод, плюс ко всему работать они будут исключительно последовательно (то есть одновременно оба никогда не будут вращаться).
Так какой и этих вариантов советуете? второй? или от pololu?
Так они же одинаковые, точнее драйвера у них одинаковые, тут дело вкуса, хотите сами контролировать ШИМ берите второй, не хотите или МК и так будет сильно загружен берите первый - у него свой контроллер имеется, который сам ШИМ генерит, отправили в него команду и он сам по себе работает.
Управлять оборотами я смогу с обоими шилдами?
Максимальные обороты и мощность движки с этими контроллерами дадут?
У меня MISO, MOSI, SCK заняты. Для этих шилдов они нужны?
Говорю же драйвера у них одинаковые, и не оборотами, а током (при разных нагрузках на валу - обороты разные).
Первый работает по UARTу, то есть всего 2 вывода - RX и TX, а точнее даже один - TX.
Второй просто драйвер, он займет выводы D4, D5, D6, D7, D8, D9, и А0, А1, А2, А3.
Для меги UART = D0 и D1 вроде, так?
Значит приоритетнее первый контроллер
У Меги 4 аппаратных UARTа + можно на любом выводе организовать программный.
Ясно спасибо.
Изучаю материалы оп pololu, не могу понять сможет ли мотор на полную работать? или этот контроллер наложит ограничения по оборотам, как у ШД?
Причем тут ШД? Вы о чем? Какое ограничение? Зачем контроллеру что-то ограничивать???
На 17 странице самый первый обзац:
For example, if we want to set motor M1 to full speed forward using the compact protocol, we could send the
following byte sequence:
in hex: 0x8D, 0x7F
in decimal: 141, 127
что переводжится как:
Например, если мы хотим запустить двигатель M1 на полной скорости вперед с помощью компактного протокола, мы могли бы написать следующую последовательность байт:
в шестнадцатеричной: 0x8D, 0x7F
в десятичной: 141, 127
maksim данке шон, заказываю.
Спасибо за помощь, отпишу о результатах.
Странно, во всех скечтах pololu управление этим модулем выполняют три пина ардуины:
Digital Pin 2 - TX
Digital Pin 3 - RX
Digital Pin 4 - RESET
Причем на самом деле TX, RX это 0 и 1 пины ардуины, видимо для управления этим шилдом любой цифровой выход подходит.
Пришел Pololu, подключил, долго разбирался, на Меге его подключил к D10, D11 тогда заработал.
Возникла другая проблема, подключил VIN (выпрямитель для зарядки АКБ) 12В, при включении Pololu напряжение поднимается до 18В, это опасно, так как максимальное напряжение 16В.
Как быть? стабилизатор ставить?
(выпрямитель для зарядки АКБ) 12В
Плохая идея. Скорее всего это "источник стабилизированный по току" (они реже попадаются и стоят дороже). То есть он старается обеспечить постоянный ток. Путем "задираем напряжение".
А вам нужно "обычный". У которого "стабилизированный по напряжению".
Вообщем IMHO вы просто блок питания не удачно выбрали.
Ясно, тогда возьму старую АКБ.
Попробовал блок питания от старого компа, он оказывается по +12В до 8А держит - все работает, только напруга садится до +6,5В, но это ничего Pololu до +6В работоспособен.
Вроде выход.
pololu (который на первой фотке) полностью устраивает, пожалел, что только один взял.
Теперь нужен, контроллер, чтобы самому управлять по PWM скважностью (например 48% при 200Гц), нужно управлять электромуфтой.
Я так понимаю теперь мне нужен тот который на второй фотке?
Надо сразу было брать оба.
Блин, сколько водки не бери все равно два раза бегать....
Жаль конечно что все пришлось делать самому на форуме так никто дельного совета не дал.
Но есть и приятная сторона! Мой друг Рома "master-uri" На данную схему сделал разводку платы и любезно предоставил мне ее для изготовления. Мой первый опыт изготовления плат с помощью лазерного принтера и утюга оказался успешным. Плата заработала как и было запланировано. Без каких либо сбоев. фото выкладываю.
Здравствуйте, подскажите пожалуйста, не осталось ли у вас еще схемы печатной платы данного ШИМ регулятора? Очень нужно управлять коллекторным двигателем постоянного тока 12в 4А с помощью обычной Ардуино
А мне больше нравяться IR2111 Ну если прям серьезно раскачивать надо кВ так 2-5 на H-мосте
IGBT ИЛИ MOSFFET
Да много разных схем есть пишите на мыло Sermaster24@gmail.com отвечу с удовольствием подскажу все что знаю.
Добрый день, попался мне в руки мотоцикл детсткий на аккумуляторе, он без РУ, но захотелось доработать. Очень понравилась ваша схема управления мотором, которая на MOSFET-ах. Попробовал ее повторить, нарисовал плату, все спаял, оно даже заработало, но как-то странно - в одну сторону мотор едет, скорость регулируется, все отлично, но как только на ногу управления направлением вращения подается логическая 1, то лабораторный БП показывает КЗ и мотор уже не крутится. Что самое интересное - на большой скважности(минимальная скорость) вращение мотора есть, то при повышении - останавливается. Вопрос - куда "копать". Может надо как-то "инвертировать" сигралы ШИМ? Просто на схеме не совсем понятно что и куда цеплять, я прицепил одну ногу ШИМ к D3, другую DIR к D12, ну и земля. Если не сложно, намекните куда рыть?
Думаю тоже собрать себе на полевиках драйвер ,а то что выше китай читаю по отзывам то 1 канал не работает ,то брак . Поэтому хотелось бы увидеть ваши наработки или схемы которые вы нашли с нагрузкой до 15 ампер .
так есть же куча готовых драйверов под большие токи.
КУПИЛИ И РАДУЙТЕСЬ
https://www.ebay.com/itm/BTS7960B-43A-Double-DC-Stepper-Motor-Driver-H-B...
Да, с того времени как писал этот пост. Много времени прошло. Многое с полевиками стало понятнее. Важно не допускать сквозных токов при открытии и закрытии, если управляем без спец драйвера. Пишите в почту, свяжемся голосом далее расскажу подробности на волнующие вопросы, сейчас просто много работы не успеваю посещать часто форум.